De robothand van ingenieurs van de University of California kan voorwerpen aanvoelen, vastpakken en manipuleren. ‘Robbie, draai jij die ledlamp maar even vast.’
Voor een brede inzet van robots is het dingen kunnen vastpakken essentieel. Bij industriële robots gaat dat recht-toe-recht-aan met zuignappen of grijpers, volledig afgestemd op het te pakken, meestal stevige product. Inmiddels zijn er ook grijpers die subtieler te werk gaan, bijvoorbeeld voor het plukken van paprika’s. Ze knijpen die niet tot pap omdat de ‘vingers’ van de robothand hun grijpkracht aanpassen. Dat gebeurt meestal via een kracht-terugkoppeling in de motoren die de vingers aansturen.
De ingenieurs van de University of California kozen een andere aanpak: ze maakten de ‘vingers’ van de grijper van zacht materiaal en gaven die ‘tastzenuwen’, zo valt te lezen in This soft robotic gripper can screw in your light bulbs for you. Deze sensoren hebben verschillende functies:
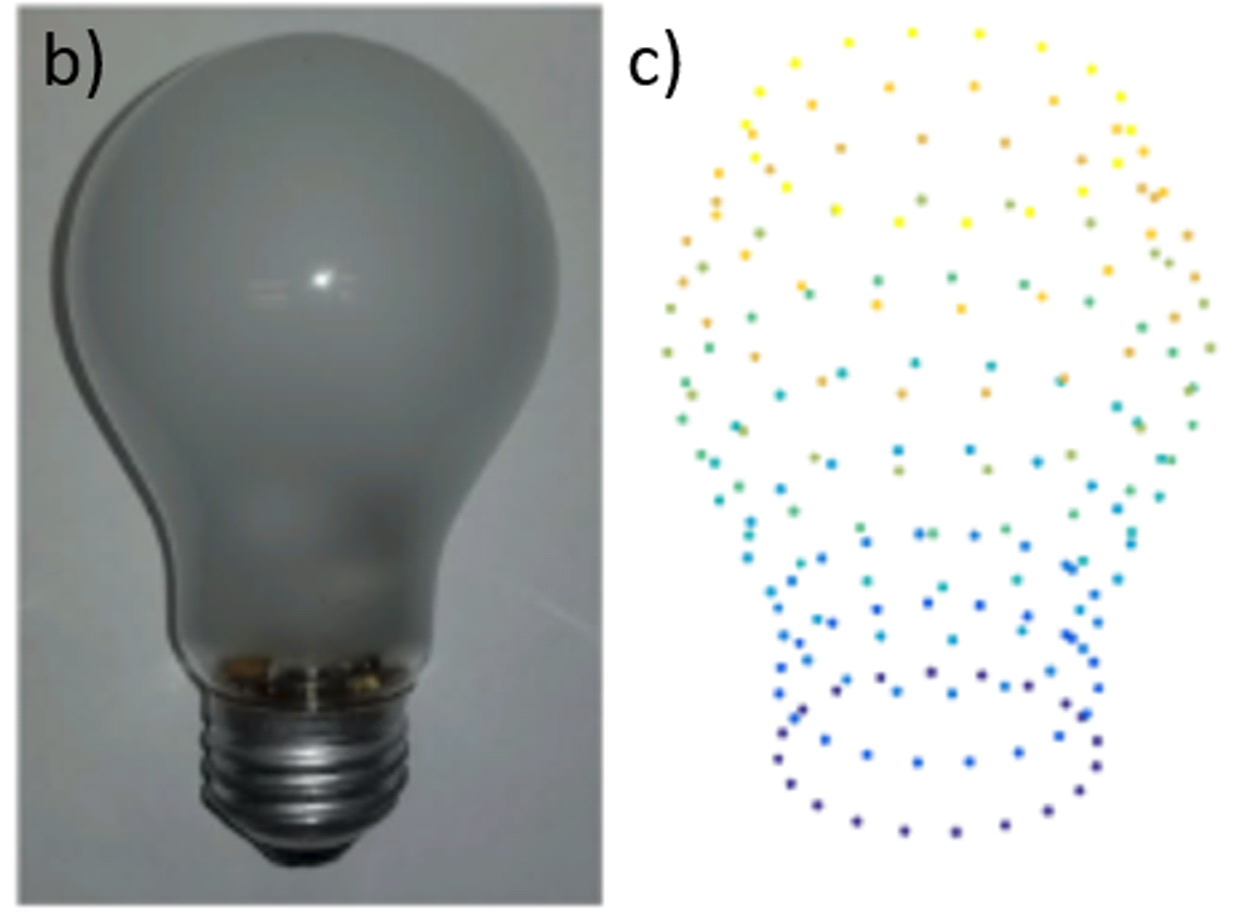
- Wanneer de ‘vingers’ het voorwerp aftasten, registreren de sensoren welke vorm de ‘vingers’ aannemen. De robot kan zich daarmee een beeld vormen van het voorwerp, dus zonder gebruik van een camera met beeldherkenning.
- De robot gebruikt de zo gecreëerde puntenwolk om het voorwerp te herkennen, bijvoorbeeld: dit is een lamp.
- Heeft de robot de lamp herkend, dan weet hij da de buitenkant van glas is, en past hij bij het pakken van het voorwerp de grijpkracht van de ‘vingers’ aan, de druksensoren in de ‘vingertoppen’ verschaffen informatie over de drukkracht van de ‘vingers’. De grijper kan zo de lamp voldoende stevig vastpakken zonder het glas te breken.
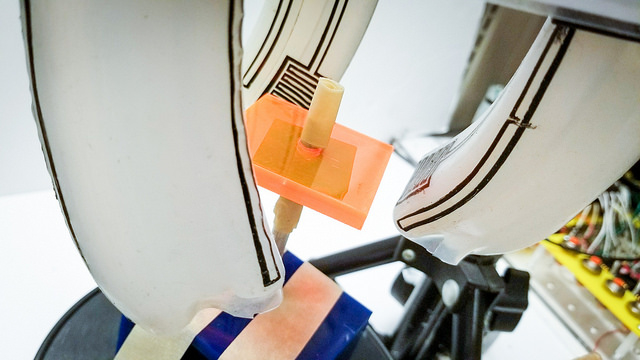
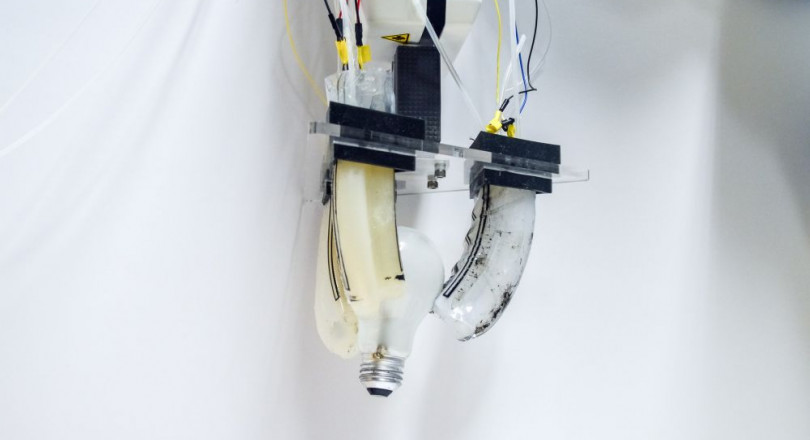
- De grijper is vervolgens in staat de lamp een slag te draaien, de ‘vingers’ in hun oude stand te brengen en de lamp opnieuw een slag te draaien, een voor een robothand complexe handeling.
De ‘vingers’ zijn gemaakt van een elastische silicone, en bestaan elk uit drie afgesloten kamers die met luchtdruk worden bediend. De constructie is zo simpel mogelijk gehouden, en stelt elke ‘vinger’ in staat om alle mogelijke bewegingen te maken. Het voordeel van zachte ‘vingers’ boven stijve van metaal is dat die zachte ‘vinger’ veel beter in staat zijn een voorwerp af te tasten.
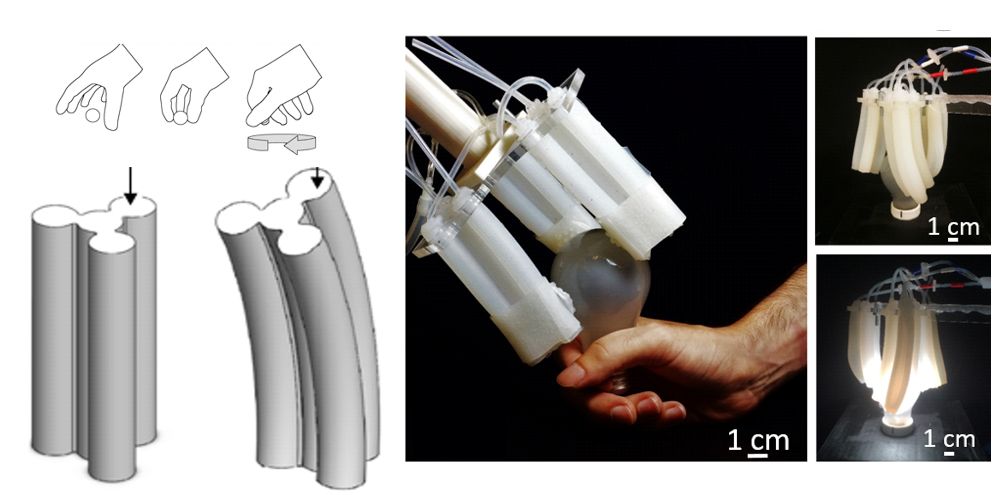
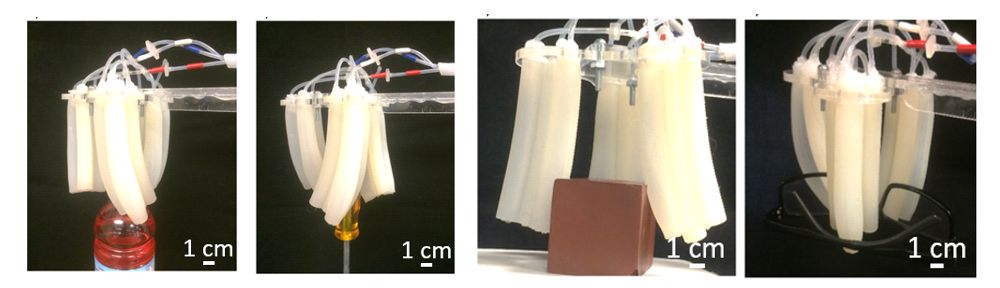
Drie ‘vingers’ samen vormen de robotgrijper, en beweging is onderling zo afgestemd dat ze verschillende handelingen kunnen verrichten, zoals het losdraaien van de dop van een fles, het met een schroevendraaier vastdraaien van een schroef, het pakken van een doosje of een complex gevormd voorwerp als een bril.
De sensoren van de ‘vingers’ zijn ingebouwd in de buitenste laag van een van de luchtkamers van de ‘vinger’, daar waar die het voorwerp zal aanraken. Een reksensor registreert de buiging van de ‘vinger’, een druksensor de kracht waarmee de ‘vinger’ het voorwerp vastpakt.
De robotgrijper is zo in staat een object af te tasten, er een 3D-model van te maken, het voorwerp te herkennen en daarop zijn grijpactie aan te passen. Perfect werkt het allemaal nog niet: zo is de diversiteit aan voorwerpen die de grijper aankan nog beperkt, de robothand kan nu alleen voorwerpen om een vaste as draaien en zou een tweede ‘hand’ moeten hebben om helemaal onafhankelijk te zijn, en de robothand weet nu nog niet hoeveel keer het voorwerp is rondgedraaid.
Er zijn inmiddels ook andere systemen om de ‘vingers’ van een robothand tastzin te geven, bijvoorbeeld door ze te voorzien van glasvezels (lees: ‘Gevoelige robothand’).
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.