

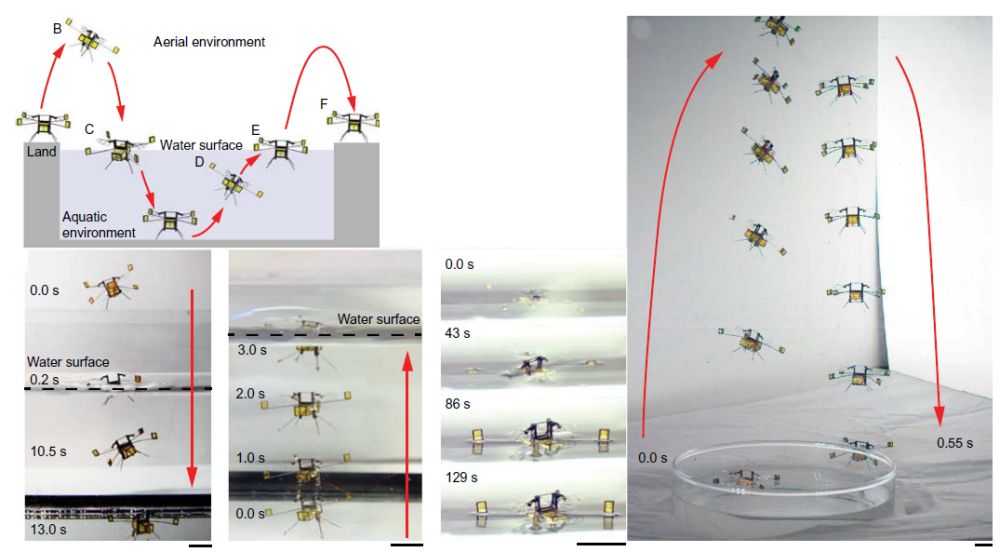
This microrobot enters the water from the air, swims round, and then flies back into the air. This air-water transition is particularly unique for an artificial fly that weighs less than one fifth of a gram.
Microrobots have the benefit of being able to fly through tight spaces, serving as mobile sensors. In the Netherlands, TU Delft's Delfly, for instance, is working on microrobots that perform all sorts of airborne stunts.
175 micrograms
But if such an artificial fly falls in the water, then it's irretrievably lost. So wouldn’t it be great if there was an artificial fly that could cope with water? It's also possible to imagine all sorts of tasks for which a microrobot would be very useful, taking measurements both above and below water. That microrobot must therefore also be able to fly in the air, swim in the water, and make the air-water transition. The latter seems trivial, but it is anything but. Getting a microrobot of just 175 micrograms to break through the surface tension of the water, either up or down, is no simple challenge.
Engineers from leading universities such as Harvard (Cambridge, US), Imperial College (London), University of California (San Diego) and Hong Kong have now developed an artificial fly that can function in both media. They published their findings this week in Science Robotics.
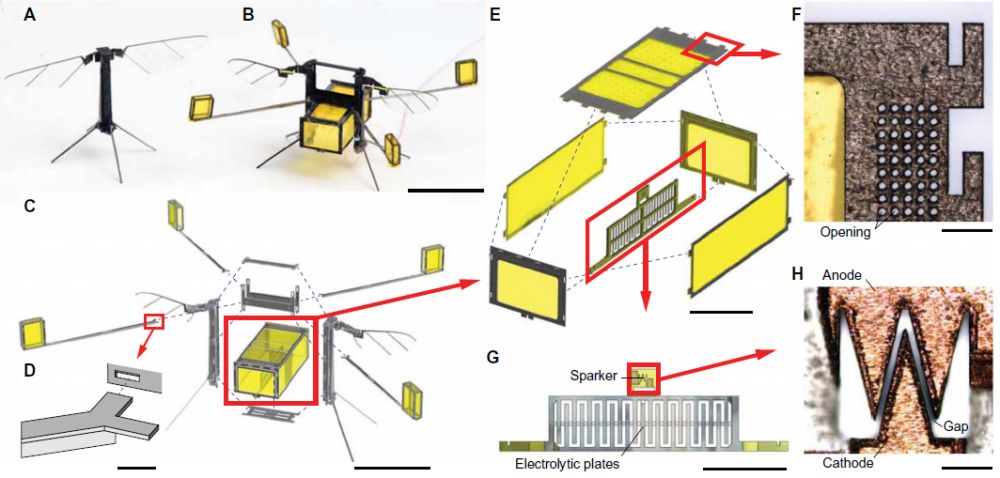
For forward motion and hovering in the air, the microrobot is fitted with flapping wings, a common technique on artificial flies. The wings are also used to move through the water. However, underwater they flap much slower, just nine times a second, while in the air the rate is 220 to 300 times a second.
Surface tension
To enter the water from the air, the artificial fly has to break through the surface tension of the water. That's only possible when the microrobot approaches the water surface at an angle, perpendicular or backwards. In those positions, the surface area of the artificial fly is small enough at landing to break through the surface tension of the water.
Taking off again from the water is more complicated. To do this, the tiny robot is fitted with a small hydrogen factory: a mini-electrolyzer device and a primer unit that provides an electrical charge. Using both of these, the robot converts water into two gases – oxygen and hydrogen. These are stored in the robot's gas chamber and discharged via channels. That occurs with a burst of power sufficient to launch the robot at a speed of 2 m/s, so that it can then fly further using its flapping wings.
The microrobot signals the transition between air and water with its own sensors. In the experimental set-up, it is still connected by a wire to an external computer that provides motion feedback during flight. This feedback is needed to keep the artificial fly stable. Ultimately, the robot will have its own microcomputer.
Following mosquitoes
The study is primarily experimental, although research head Yufeng Chen can imagine a number of applications, according to the interview published by Science Robotics. Chen listed water quality monitoring from pond to pond, or following certain insects that live on the boundary between water and air, such as mosquito (larvae).
The films below show some of the microrobot’s movements.
Taking off from water:
Taking off and landing:
Newsletter
Interested? Want to read more? Subscribe to our free weekly newsletter.
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.