
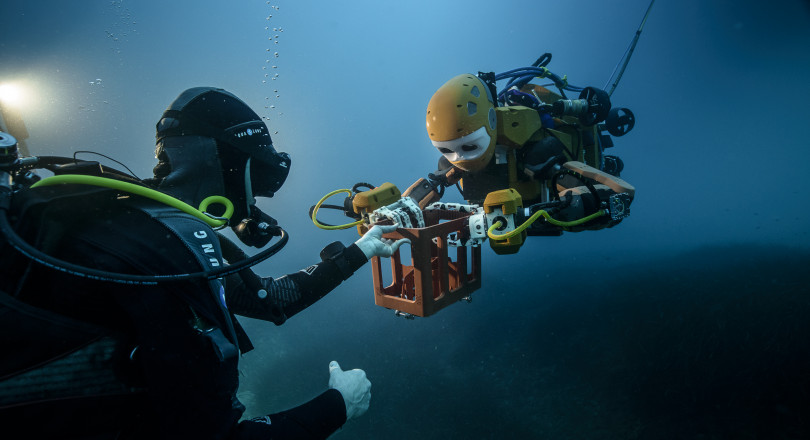
De OceanOne is een humanoïde robot die vrijwel autonoom kan duiken. Onlangs slaagde de aan de Amerikaanse Standford University ontwikkelde robot glansrijk voor zijn eerste praktijktest.
De humanoïde duikrobot OceanOne haalde vorige maand op 100 m diepte een oude vaas uit het scheepswrak La Lune, het vlaggenschip van zonnekoning Lodewijk XIV. De Amerikaanse computerwetenschapper Oussama Khatib zat aan boord van een schip achter het ‘stuur’. ‘Ik zag en voelde wat de robot zag en voelde. En ik ging uit mijn dak toen hij de missie succesvol volbracht’, aldus de professor van de Stanford University, die met een team van studenten de OceanOne ontwierp.
Push-up
Het debuut van ’s werelds eerste menselijk ogende duikrobot, die is voorzien van een hoofd, romp, armen en vingers, verliep vrijwel vlekkeloos.
Een keer kwam de 1,5 m grote robot klem te zitten tussen twee kanonnen. Zijn boegschroeven bleken niet in staat hem los te wrikken. Khatib nam de controle over en liet de robot een soort push-up uitvoeren. Daarmee lukte het hem om los te komen.
'Het illustreert hoe gevaarlijk het is om diep gelegen scheepswrakken te onderzoeken.’
Knijpen
De OceanOne kan vrijwel autonoom duiken met behulp van diverse sensoren, camera’s en slimme algoritmen. De algoritmen worden gevoed met de sensor- en cameradata en passen continu de snelheid van de boegschroeven aan. De robot weet zo hindernissen te ontwijken en koers te houden.
De bestuurder van de OceanOne kan dus deels rustig achterover leunen. Wel krijgt hij naast de beelden ook haptische feedback via krachtsensoren in de polsen van de robot. ‘Je voelt via de controllers wat de robot voelt. Maar hij is zelf in staat om een adequate grip uit te oefenen. Hij zal niets stuk knijpen.’
Olievelden
De OceanOne, die tot een diepte van 1000 m diep kan duiken, is een alternatief voor zogenoemde ROV’s (remotely operated vehicles), op afstand bestuurbare onderwaterrobots die met name opereren in diep water gelegen olievelden.
Die zijn echter niet zo geschikt om kwetsbare koraalriffen en scheepswrakken te onderzoeken. Anders dan de OceanOne, zijn ze relatief groot en lomp, niet intuïtief te besturen en weinig wendbaar in krappe ruimtes.
‘Denk bij mogelijke toepassingen van de OceanOne ook aan inspectie van levensgevaarlijke plekken als de kerncentrale bij Fukushima, die in 2011 zwaar beschadigd raakte’, vult Khatib aan.
De OceanOne keert deze maand terug naar de Stanford-campus voor een laatste serie verbeteringen.
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.