
The robot hand by engineers from the University of California can feel, grasp and manipulate objects. ‘Robbie, could you screw in that LED for me please?’
The ability to grasp things is essential for a wide range of robots. For industrial robots, this is done directly using suction cups or grippers that are completely fine-tuned to the often sturdy product to be grasped. Grippers with a more subtle grasp are now available, for plucking peppers, for instance. These robots don't crush the peppers to pulp because the ‘fingers’ of their robot hand adapt the pressure accordingly. This is mostly done using pressure sensors in the motors that drive the fingers.
However, the engineers at the University of California opted for a different approach: they made the ‘fingers’ of the gripper from soft material and gave them ‘haptic nerves’, as you can read about in This soft robotic gripper can screw in your light bulbs for you. These sensors serve different functions:
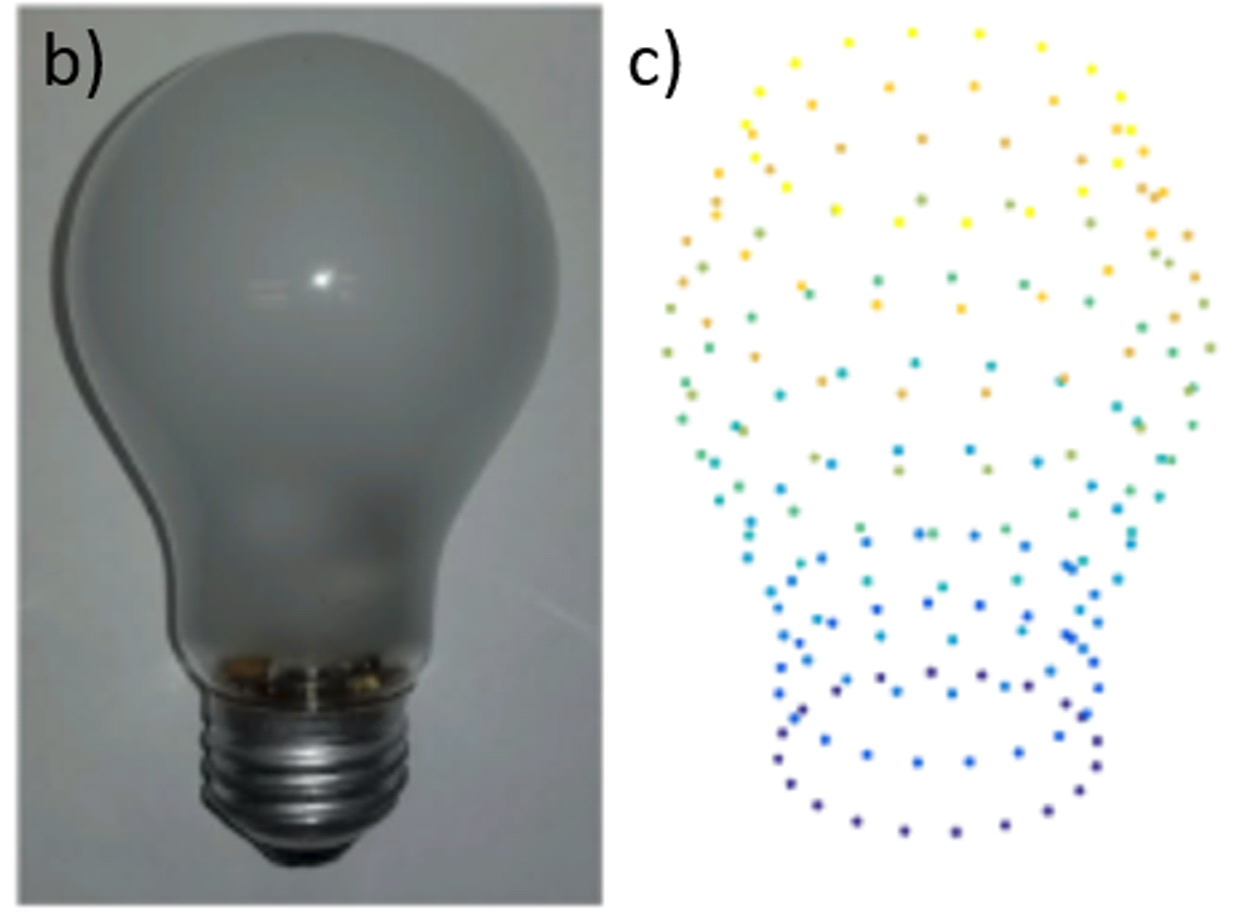
- When the ‘fingers’ feel for the object, the sensors register the shape taken by the ‘fingers’. The robot is thus able to form a picture of the object, without having to use a camera with image recognition.
- This enables the robot to create a point cloud to recognise the object, sensing “this is a light bulb”, for instance.
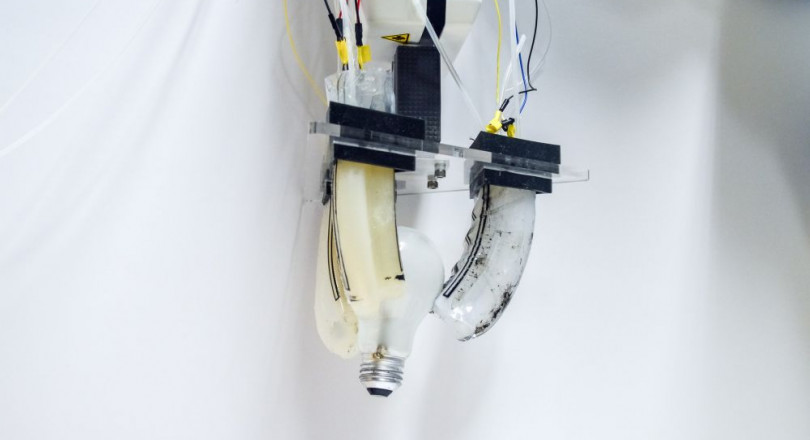
- Once the robot has recognised the light bulb, then it knows that the surface is made of glass, and adjusts the pressure of the grip from the ‘fingers’ on the object, with the pressure sensors in the ‘finger tips’ providing information about the pressure applied by the ‘fingers’. This means the light bulb can be gripped sturdily enough without breaking the glass.
- The gripper is then able to rotate the light bulb one turn, return the ‘fingers’ to their original position and once again turn the light bulb one rotation, a complex action for a robot hand.
The ‘fingers’ are made of an elastic silicone, with each one comprising three sealed chambers operated with compressed air. The construction is kept as simple as possible, and enables each ‘finger’ to make all possible movements. The benefit of soft ‘fingers’ versus stiff metal is that the soft ‘finger’ is much better able to feel objects.
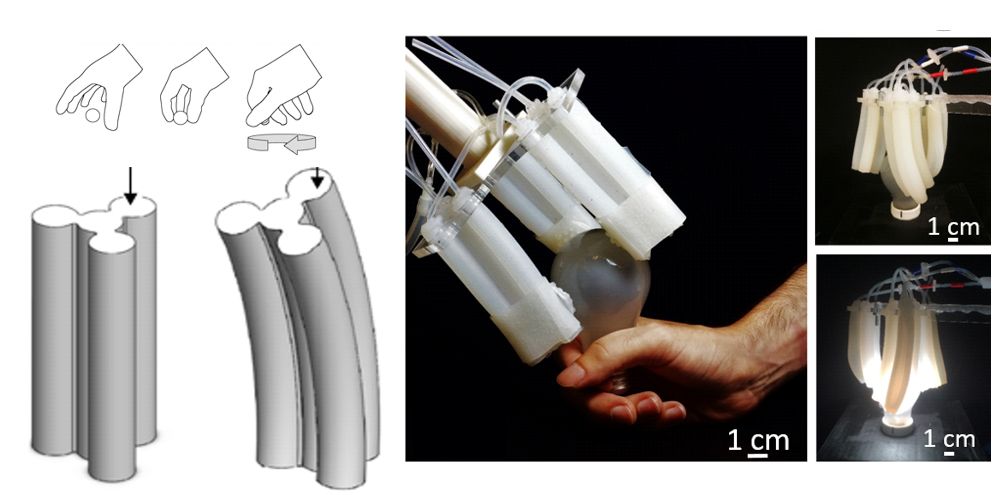
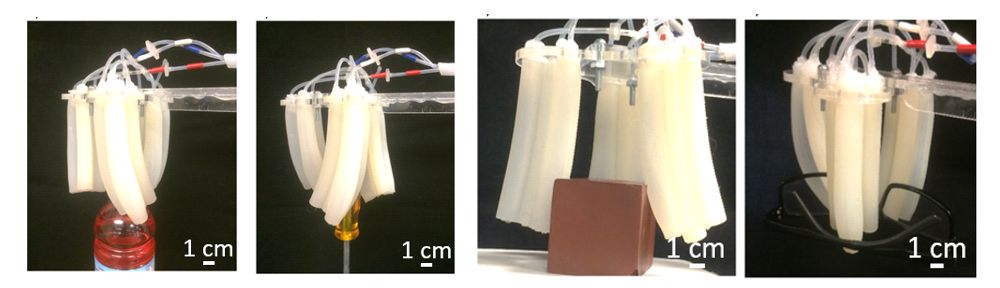
Three ‘fingers’ together form the robot gripper, and movement has been coordinated in such a way that they can carry out various actions, such as undoing bottle tops, tightening a screw with a screwdriver, picking up a box or an object with a complex shape like a pair of spectacles.
The sensors in the ‘fingers’ are incorporated in the outer layer of one of the air chambers of the ‘finger’, at the point at which it touches an object. A strain sensor registers how far the ‘finger’ bends, and a pressure sensor, the force with which the ‘finger’ grips the object.
This means that the robot gripper is able to feel the object, generate a 3D-model of it, recognise the object and adapt its gripping action as necessary. It doesn't yet work perfectly: the variety of objects that the gripper can cope with is still limited, the robot hand can only twist objects along a fixed axis and would need a second ‘hand’ to become entirely autonomous. What's more, the robot hand doesn’t yet know how many times an object has been rotated.
Other systems have also been created to give the ‘fingers’ of a robot hand the ability to feel, by fitting them with optical fibres, for instance.
Did you like this article? Subscribe to our weekly newsletter.
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.