
Het is Amerikaanse ingenieurs gelukt een minirobotje van flexibel materiaal te bouwen dat kan bewegen. Zo’n zachte robot is vooral geschikt voor toepassingen waarbij de omgeving niet mag beschadigen.
Minirobots van rond een centimeter zijn meestal gemaakt van harde printplaatjes en metalen sprietjes, niet geschikt om in een omgeving te werken waar geen schade mag worden toegebracht, bijvoorbeeld aan menselijk weefsel.
Aangedreven met vloeistofdruk
Ingenieurs van ingenieursinstituten van Harvard en de Boston University hebben nu een robotje gemaakt van siliconenrubber. Onderdelen die moeten bewegen worden hydraulisch aangedreven met vloeistof in microkanaaltjes. De vloeistofdruk komt nog wel van buiten en wordt geleverd via dunne vloeistofbuisjes.
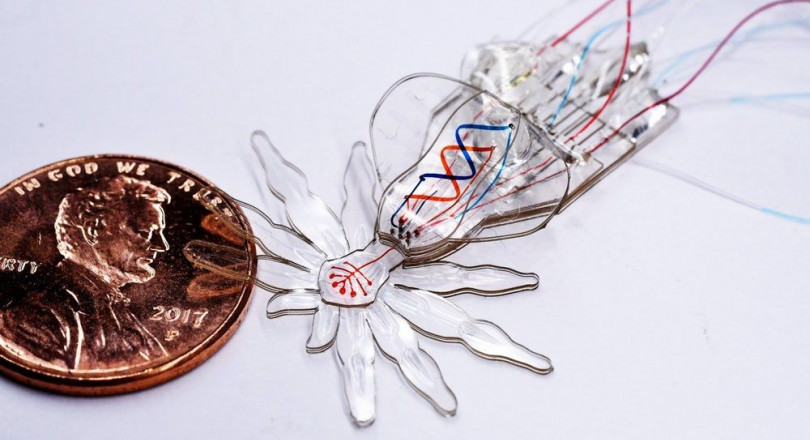
De innovatie zit ‘m vooral in de nieuwe productietechniek die de ingenieurs ontwikkelden, zo berichten ze op de website van het Harvard Wyss Instituut voor Biological Inspired Engineeeing. Om die te demonstreren maakten ze een kopie van de Australische Pauwspin.

Twaalf laagjes met microgeultjes
De robotspin is opgebouwd uit 12 laagjes elastisch siliconenrubber, die met een microlasersnijder precies op maat zijn gemaakt. Vervolgens zijn al die laagjes aan elkaar geplakt. In elk afzonderlijk laagje zijn dan ook al microgleufjes uitgesneden, zodat die gezamenlijk een systeem van microkanaaltjes vormen.
Vervolgens wordt in sommige van die kanaaltjes een speciale hars ingespoten die er voor zorgt dat de platte aan elkaar geplakte laagjes en bepaalde vorm aannemen. Bij de namaakspin zijn dat omlaag gebogen pootjes en een gebolde buik.
Geprogrammeerde vervorming
De wijze waarop het materiaal onder invloed van de ingespoten hars reageert wordt bepaald door de samenstelling van de siliconenrubber aan weerszijden van het kanaaltje. ‘We hebben volledige controle over de vorm die het materiaal aanneemt door de dikte en de dichtheid van het materiaal rond zo’n microkanaal te variëren’, aldus onderzoeker Tommaso Ranzani in het webbericht.
Andere kanaaltjes worden vervolgens gebruikt om bepaalde delen van de robotspin een kleur te geven en om ze te bewegen.
Kwallenvanger
Volgens de ingenieurs leent het productieproces zich om allerhande zachte minirobotjes te maken, bijvoorbeeld voor bepaalde toepassingen in het menselijk lichaam zoals onderzoek van de darm of de slokdarm, of voor onderzoek van kwetsbare organismen in zee.
Wyss Instituut specialiseert zich zachte robotica. Eerder maakten onderzoekers daar al een zachte minirobot in de vorm van een octopus (lees ‘Eerste volledig zachte robot’), maar daarbij gebruikten ze een andere productietechniek. Onlangs nog kwam het instituut in het nieuws met een zachte kwallenvanger (lees ‘Kwallen vangen met origami’).
Openingsbeeld: Wyss Institute at Harvard University.
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.