
Een kwal is een kwetsbaar weekdier dat voor 95 procent uit water bestaat. Dat maakt het lastig om hem voor onderzoek uit het water te halen, zeker de soorten die diep in de zee leven. Er bestaat wel apparatuur om kwallen en andere weekdieren te vangen, maar die apparaten zijn gemaakt van hard materiaal waardoor de kwal vaak beschadigd raakt.
Zeebioloog en kwallenexpert David Gruber ging op zoek naar een manier om die schade te voorkomen en bouwde een robotarm met zachte vingers. De hand van deze robot kan kwallen vastpakken zonder ze letsel toe te brengen. ‘Ik heb er altijd moeite mee gehad om de zeedieren die ik onderzoek, eerst te moeten doden’, zegt Gruber.
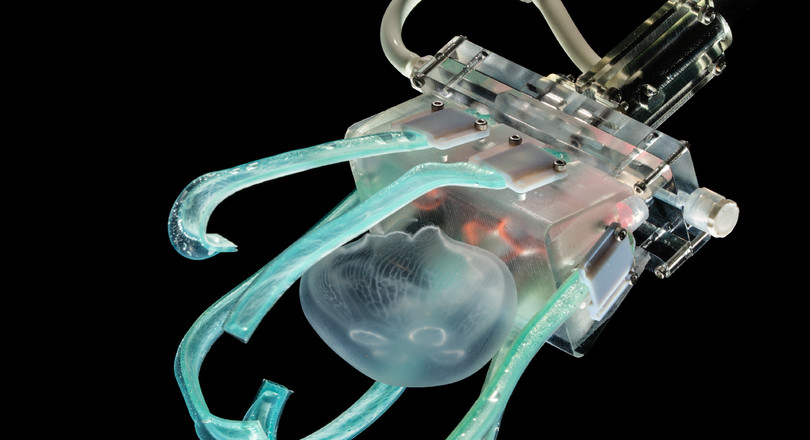
Tentakels
De grijphand heeft zes vingers, die eruitzien als spaghettiachtige tentakels en zijn gemaakt van holle reepjes siliconen. Aan de binnenkant zijn deze vingers stugger waardoor de buigrichting beter is te bepalen. De grijper wordt bediend met een druk op een knop, waarna de vingers zich met water vullen. Hierdoor krullen ze langzaam om.
De druk die de vingers uitoefenen op de kwal is minder dan één tiende van de druk die een menselijk ooglid op het oog uitoefent. Met deze extreem zachte greep houdt de robot het kwetsbare weekdier zachtjes gevangen in zijn hand. Ondanks het zachte materiaal is de kwallenrobot sterk genoeg om diep onder water te opereren.
Het is een mooi begin, vindt Gruber, maar zijn uitvinding is nog niet klaar. De volgende stap is het uitbreiden van de robot met sensoren en camera’s, om een op afstand bestuurbaar mini-laboratorium te bouwen.
Foto: Anand Varma
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.