

Betere ogen voor autopiloot
Commerciële vliegtuigen landen standaard op de automatische piloot, maar dat kan alleen op grote luchthavens. Een nieuwe techniek geeft een vliegtuig echter zulke goede 'ogen' dat ook op kleine vliegvelden de piloot niet meer in actie hoeft te komen.
Het nieuwe systeem bestaat uit twee camera's en een pakket software en werkt ook bij slecht zicht. Volgens de bedenkers is het een cruciale stap op weg naar een luchtvaart waarin meer autonome toestellen rondvliegen.
Radiosignalen
Vooralsnog is de aanwezigheid van een goede automatische piloot in het vliegtuig alleen niet voldoende om automatisch te kunnen landen. De luchthaven waarop wordt geland dient te beschikken over een Instrument Landing System (ILS), een radionavigatiesysteem dat bestaat uit een koerslijnbaken, dat de richting van het toestel vaststelt, en een dalingslijnbaken, dat de daalhoek bepaalt. Daarnaast moet er een DMA (Distance Measuring Equipment)-baken staan, dat de afstand van het vliegtuig tot het baken meet.
Het ILS stuurt radiosignalen naar de automatische piloot. Die bepaalt vervolgens op basis van die signalen welke koers en hoogte hij moet aanhouden en zet het toestel veilig aan de grond, zonder dat de piloot in actie hoeft te komen.
Piloot
Een alternatieve methode is om gebruik te maken van satellietnavigatie, maar daarbij is het noodzakelijk dat het vliegveld waarop wordt geland is uitgerust met een speciaal systeem dat de GPS-signalen corrigeert. De GPS die voor de navigatie wordt gebruikt, is namelijk gevoelig voor atmosferische verstoringen en daardoor niet volledig betrouwbaar.
Kleinere vliegvelden beschikken echter niet over dergelijke systemen. Het gevolg is dat piloten wel de automatische piloot kunnen gebruiken om een vliegveld te naderen, maar dat de piloot vlak voor het toestel daadwerkelijk landt, op zestig meter hoogte, de besturing weer moet overnemen.
Twee camera's
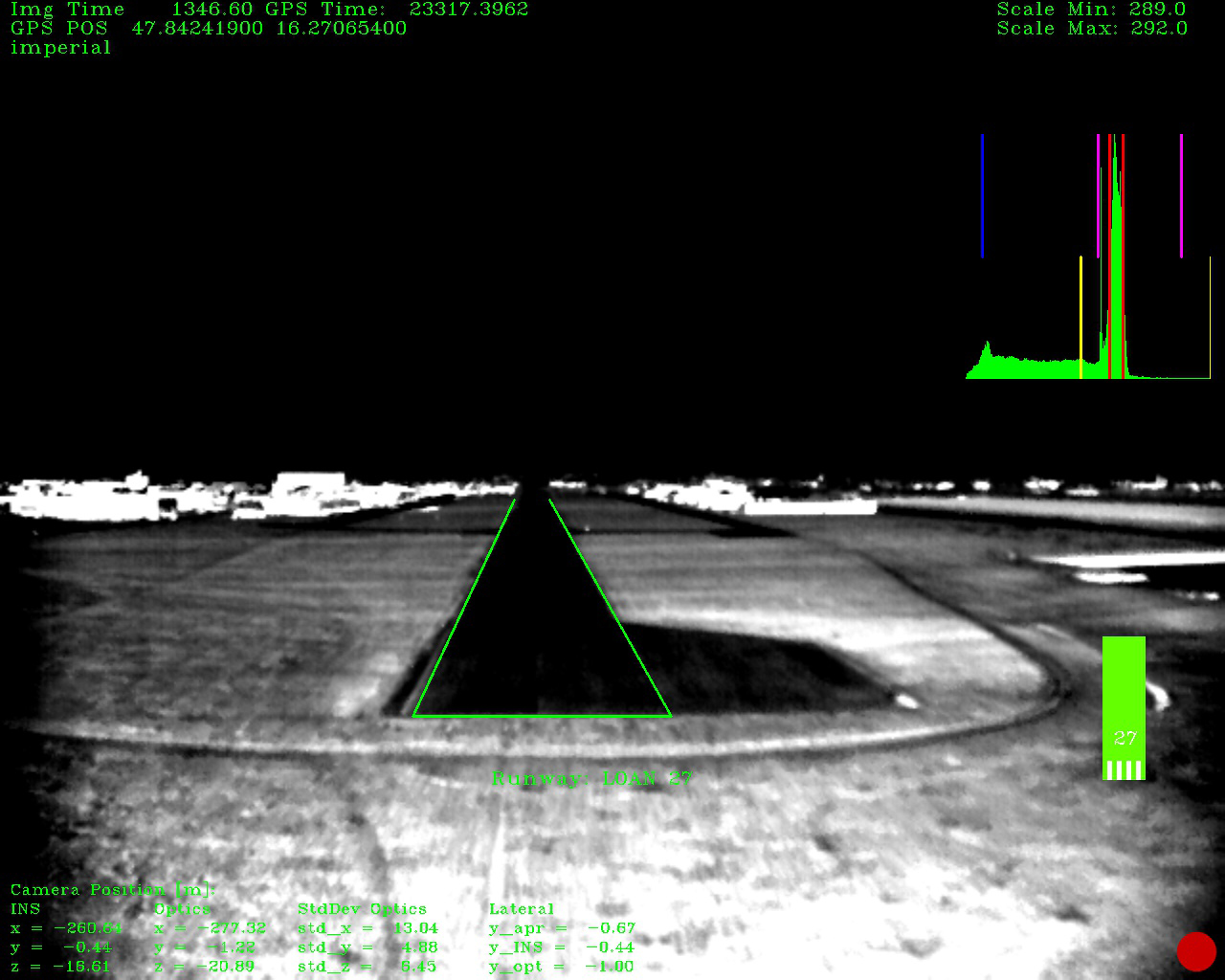
Onderzoekers van de Technische Universität München en de TU Braunschweig hebben nu een optisch referentiesysteem ontwikkeld dat de aanwezigheid van grondstations overbodig maakt, zo schrijven ze in Proceedings of the ION. Het bestaat uit een 'gewone' camera en een infraroodcamera – zodat slecht zicht geen hinderpaal vormt.
Daarnaast ontwikkelden ze software die de binnenkomende beelden verwerkt en exact kan bepalen waar het vliegtuig zich bevindt ten opzichte van de landingsbaan. Daarbij worden GPS-signalen vergeleken met de data van de camera's, waarna de ideale daalhoek en koerslijn worden bepaald. Het systeem kan zelf vervolgens de volledige landing uitvoeren.
Geslaagde testlanding
Eind mei hebben de onderzoekers hun systeem voor het eerst succesvol getest op het vliegveld van Wiener-Neustadt. Testpiloot Thomas Wimmer was enthousiast. 'De camera's herkenden de landingsbaan al van grote afstand', zegt hij in een persbericht. 'Het systeem leidde het vliegtuig volledig automatisch door de hele landingsprocedure en zette de kist vervolgens midden op de landingsbaan aan de grond.'

Vrachtdrones en vliegende taxi's
Volgens Martin Kügler, een van de onderzoekers van de TUM, is het vermogen om te landen op de automatische piloot zeker in de toekomst cruciaal: denk aan vrachtdrones of aan vliegende taxidrones, waarbij er geen piloot aan boord zal zijn. Een ander voordeel van het nieuwe systeem is dat de noodzaak om dure grondstations te installeren en onderhouden verdwijnt.
Automatische beeldherkenning is handig voor navgatie, maar kan ook mis gaan. Eerder dit jaar brachten hackers de automatische piloot van een Tesla volledig in de war door een paar eenvoudige stickers op de weg te plakken.
Foto's: Andreas Dekiert / C2Land







Reacties