
Exoskelet dat het wel doet
Tijdens de opening van het WK in Brazilië trok het exoskelet van Juliano Pinto de aandacht. Maar echt goed werkt die breingestuurde looprobot niet, dat geldt wel voor de bodywalker van Herman van der Kooij.
Mindwalker is de officiële naam van het Europese project waarbinnen professor Herman van der Kooij aan zijn exoskelet werkt. Het idee is dat signalen van de hersenen kunnen worden gebruikt om het uitwendige skelet aan te sturen. Van der Kooij: ‘Actief denken – ik wil een stap zetten – levert een bepaald patroon in de hersenactiviteit op, dat met de nodige rekenkracht is te herkennen. Groepen elders hebben daar ook de sensoren en software voor ontwikkeld. Maar dat gaat niet ideaal: het blijkt heel lastig die loopgedachte eruit te filteren, en dat duurt ook nog eens minstens een seconde.’
Los hiervan heeft Van der Kooij voor mensen met een lage dwarslaesie, die dus zelf niet meer kunnen lopen, maar hun bovenlichaam wel kunnen gebruiken, een heel pragmatisch argument om het skelet met het bovenlichaam aan te sturen. ‘Wat mensen die aan een rolstoel zijn gebonden vooral nodig hebben, is bewegen. Het is ook veel natuurlijker om te lopen door je zwaartepunt te verplaatsen. Gezonde mensen doen dat onbewust, dat willen we ook met gehandicapten bereiken.’ De mindwalker kan dus beter de bodywalker heten.
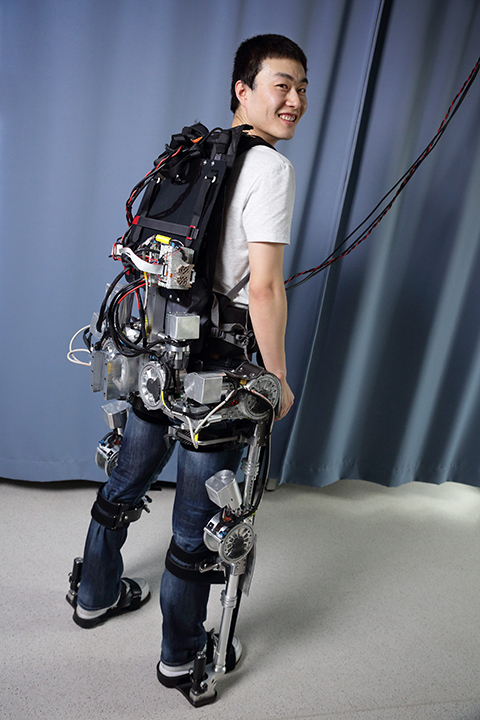
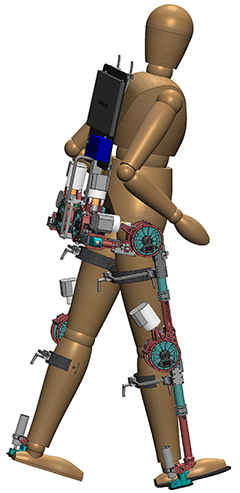
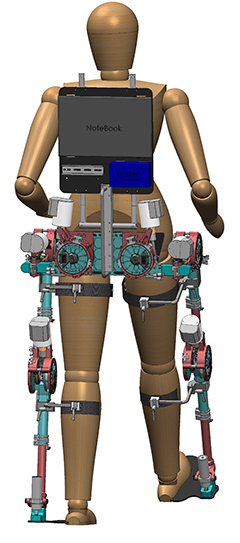
Van der Kooij werkt in een samenwerkingsproject van de technische universiteiten van Twente en Delft aan het uitwendige skelet dat het lopen mogelijk maakt. Dit exoskelet zit vastgemaakt rond de heupen en loopt langs beide benen met stangen helemaal door tot onderaan de voet. Het skelet draagt het bovenlichaam, tenminste als het is geactiveerd, en dat is wat Wang doet met die druk op de knop. Scharnierende motoren bij de heupen en de knie maken een loopbeweging mogelijk.
Exoskeletten bestaan al langer. Zo zijn er de Rewalk van het Israëlische Argo Medical Technologies, de eLegs van het Amerikaanse Ekso Bionics en de Rex van Rex Bionics uit Nieuw Zeeland. ‘Bij die eerste twee zijn altijd krukken nodig, terwijl lopen met de Rex alleen heel langzaam gaat, met 3 m per minuut.’ Van der Kooij wijst op andere verschillen. ‘Vanwege de dubbele scharnier bij de heupen maakt ons exoskelet het zijwaartse plaatsen van de voet mogelijk. Het kan ook stappen maken van verschillende grootte. Dat zijn allemaal bewegingen die nodig zijn om stabiel te lopen.’
Stabiel lopen, het is gauw gezegd, maar wie het bij zichzelf nagaat, zal merken dat het helemaal niet zo simpel is. ‘Lopen is een gecontroleerde manier van voorover vallen, met een subtiel samenspel tussen spieren en sensorische prikkels die ook vanuit de spieren zelf komen. We zijn heel goed in staat om te voelen dat we in onbalans raken en corrigeren met bepaalde bewegingen, heel subtiel en razendsnel.’
Om dat met een exoskelet na te bootsen moest Van der Kooij eerst weten hoe dat subtiele samenspel in elkaar steekt. ‘Gek genoeg weten we daar heel weinig van. Daarom zijn we begonnen om met proefpersonen het lopen te onderzoeken. Wat doet iemand om in balans te blijven als er een oneffenheid is, of als we hem of haar een beetje opzij duwen.’ De experimenten leverden een eerste model van het lopen op dat laat zien welke bewegingen we maken om in balans te blijven. Van der Kooij gebruikt parameters van dat model om het exoskelet aan te sturen. ‘We bevinden ons met dat loopmodel nog in het beginstadium, maar we zien nu al dat het werkt.’
Het bouwen van het externe skelet beschouwt Van der Kooij als een knap staaltje van mechanotronica, waarbij mechanische beweging en elektronische aansturing volledig zijn geïntegreerd. ‘Samen met het bedrijf Ketels in Drunen hebben we de motoren ontwikkeld die zorgen voor de beweging. Normaliter hebben die een gewicht van zo’n 6 kg, wij hebben dat teruggebracht tot 1 kg. Onze compacte motor levert een draaikracht van 100 Nm, dat is voldoende om iemand met een gewicht van ruim 100 kg te dragen.’ Ook het energiegebruik van de motor is relatief laag. ‘Het exoskelet moet bij elke stap in het been dat naar voren gaat energie absorberen, dan werkt de motor als een dynamo. Dat alles maakt dat de gebruiker geen al te groot accupakket op zijn rug hoeft mee te zeulen.’
Voor de verdere ontwikkeling van het exoskelet denkt Van der Kooij aan de volgende stappen: het 23 kg wegende skelet een factor twee tot drie lichter maken, de enkel van de voet actief aansturen, het loopmodel verfijnen en de aansturing intuïtiever maken, zoals bij gezonde mensen. ‘Het skelet zit nu nog vrij stijf in elkaar. Misschien moeten we het wat elastischer maken, waarmee de beweging ook wat natuurlijker wordt.’







Reacties