
Marslander InSight duwt meetinstrument in de grond
Een jaar lang worstelde de marslander InSight met het de bodem in krijgen van een belangrijk meetinstrument. Nu hebben ingenieurs de oplossing gevonden: ze laten de robotarm van de lander het instrument de stoffige rode bodem in duwen. Dat lijkt te lukken.
Wie wel eens op de camping een tent heeft opgezet, weet dat het soms niet lukt om een haring de grond in te krijgen. Je komt onder de oppervlakte een steen tegen; of de ondergrond is juist te los.
Een dergelijk probleem doet zich nu voor op de planeet Mars — alleen dan zonder kampeerders. Een van de meetinstrumenten van de marslander InSight had vorig jaar al in de grond gehamerd moeten worden, maar dat lukte steeds maar niet.
Nu hebben ingenieurs van DLR (het Duitse Ruimtevaartcentrum) de oplossing hiervoor gevonden, meldden ze deze week in een blog. Ze hebben de robotarm van de marslander ingezet om het meetinstrument — heel voorzichtig — het eerste stukje de bodem in te duwen.
Camera's en meetinstrumenten
InSight, het resultaat van een brede internationale samenwerking, landde eind 2018 op de rode planeet. Aan boord heeft de lander verschillende camera’s die de omgeving vastleggen, en meetinstrumenten voor het bepalen van seismische activiteit en de temperatuurverdeling in de bodem.
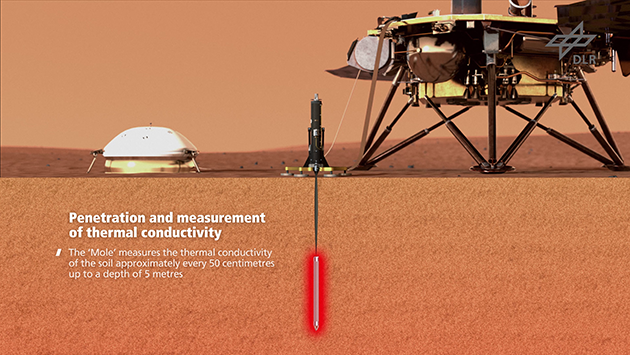
Voor dat laatstgenoemde doel heeft InSight de Heat Flow and Physical Properties Probe (HP3) meegenomen. Dit is een soort metalen paaltje met een scherpe punt, dat van binnen een vernuftig mechanisme heeft, zodat het ding zichzelf de bodem in kan hameren (lees ook: ‘Lander hamert in de ondergrond van Mars’). Deze ‘mol’, zoals hij wordt genoemd, trekt dan een sliert met zich mee de bodem in, met daarop verschillende thermometers. Mol en sliert blijven in de bodem zitten om daar gedurende minstens twee jaar de temperatuurverdeling te meten.
Mol bleef steken
Een prachtig plan, maar deze HP3 ging lastig de marsgrond in. In maart 2019 begon men met deze procedure, maar al snel bleef de mol steken. Eerst leek het er op dat hij een rots had geraakt, maar na verder onderzoek door de ingenieurs op aarde, moesten zij concluderen dat het probleem lijkt te liggen bij de zanderige bodem die InSight tegenkwam: deze gaf minder wrijving dan verwacht. De mol kan hierdoor geen grip krijgen op de bodem. Ook al beweegt hij omlaag, toch springt hij er steeds weer uit.
Robotarm
 Creatief als (ruimtevaart)ingenieurs zijn, bedachten ze een oplossing. Na uitgebreide tests op aarde met nagemaakte onderdelen (zie foto) gebruikten ze het schepje aan het uiteinde van de robotarm van de lander om de achterkant van de mol in de grond te duwen. Dit ging heel voorzichtig, schrijft DLR-ingenieur Tilman Spohn in zijn blog: ‘Het schepje wordt heel langzaam naar beneden gebracht tot het de achterkant van de mol raakt. Dan laten we de robotarm verder neer en we regelen het zo dat de schep met een kracht van ongeveer 50 newton (ongeveer het gewicht van 5 kilogram op aarde, red.) op de mol drukt. Wanneer de mol naar beneden gaat, volgt de schep die neerwaartse beweging, maar we laten de belasting afnemen tot nul. Nu herhalen we deze duwactie een aantal keer.’
Creatief als (ruimtevaart)ingenieurs zijn, bedachten ze een oplossing. Na uitgebreide tests op aarde met nagemaakte onderdelen (zie foto) gebruikten ze het schepje aan het uiteinde van de robotarm van de lander om de achterkant van de mol in de grond te duwen. Dit ging heel voorzichtig, schrijft DLR-ingenieur Tilman Spohn in zijn blog: ‘Het schepje wordt heel langzaam naar beneden gebracht tot het de achterkant van de mol raakt. Dan laten we de robotarm verder neer en we regelen het zo dat de schep met een kracht van ongeveer 50 newton (ongeveer het gewicht van 5 kilogram op aarde, red.) op de mol drukt. Wanneer de mol naar beneden gaat, volgt de schep die neerwaartse beweging, maar we laten de belasting afnemen tot nul. Nu herhalen we deze duwactie een aantal keer.’
7 centimeter
In het begin lieten de ingenieurs de robotarm maar 25 keer duwen per sessie, maar nu ze meer vertrouwen hebben in hun procedure, hebben ze dat opgevoerd tot 150 ‘slagen’ per keer. In 6 sessies, verdeeld over de afgelopen 11 weken, is de mol ongeveer 7 centimeter de zanderige bodem in geduwd. De voortgang is te zien in deze korte video, gemaakt door een van de camera's van InSight:

Succes
Voorlopig is de creatieve aanpak een succes. De ingenieurs denken dat als de achterzijde van de mol twintig centimeter diep is gekomen, het niet meer nodig is om te duwen. Dan zal de mol (weer) zichzelf de bodem in moeten kunnen duwen. ‘De volgende stap, wanneer de mol zelf zijn werk zal moeten doen, wordt erg spannend’, schrijft Spohn in zijn blog.
Foto's en illustraties DLR / NASA / JPL-Caltech
Meer artikelen

Een AI-fabriek in Groningen

Gezondheid meten via zweetdruppels


Nieuwste artikelen
Een AI-fabriek in Groningen


