
Robot helpt reddingsteam
Het Instituto Italiano di Technologia (IIT) werkt binnen een EU-samenwerkingsproject aan de Walk-Man, een robot die reddingsteams kan ondersteunen, onder meer door taken uit te voeren in brandende gebouwen.
Tijdens hun werk worden brandweermannen en -vrouwen blootgesteld aan onder meer zware rookontwikkeling, giftige stoffen, extreme temperaturen en explosie- of instortingsgevaar. Gezien de vele technische ontwikkelingen is het niet meer dan logisch dat robots een deel van dit werk gaan overnemen. Het Walk-Manproject loopt sinds 2013 en zit nu in de testfase.
 Laag gewicht
Laag gewicht
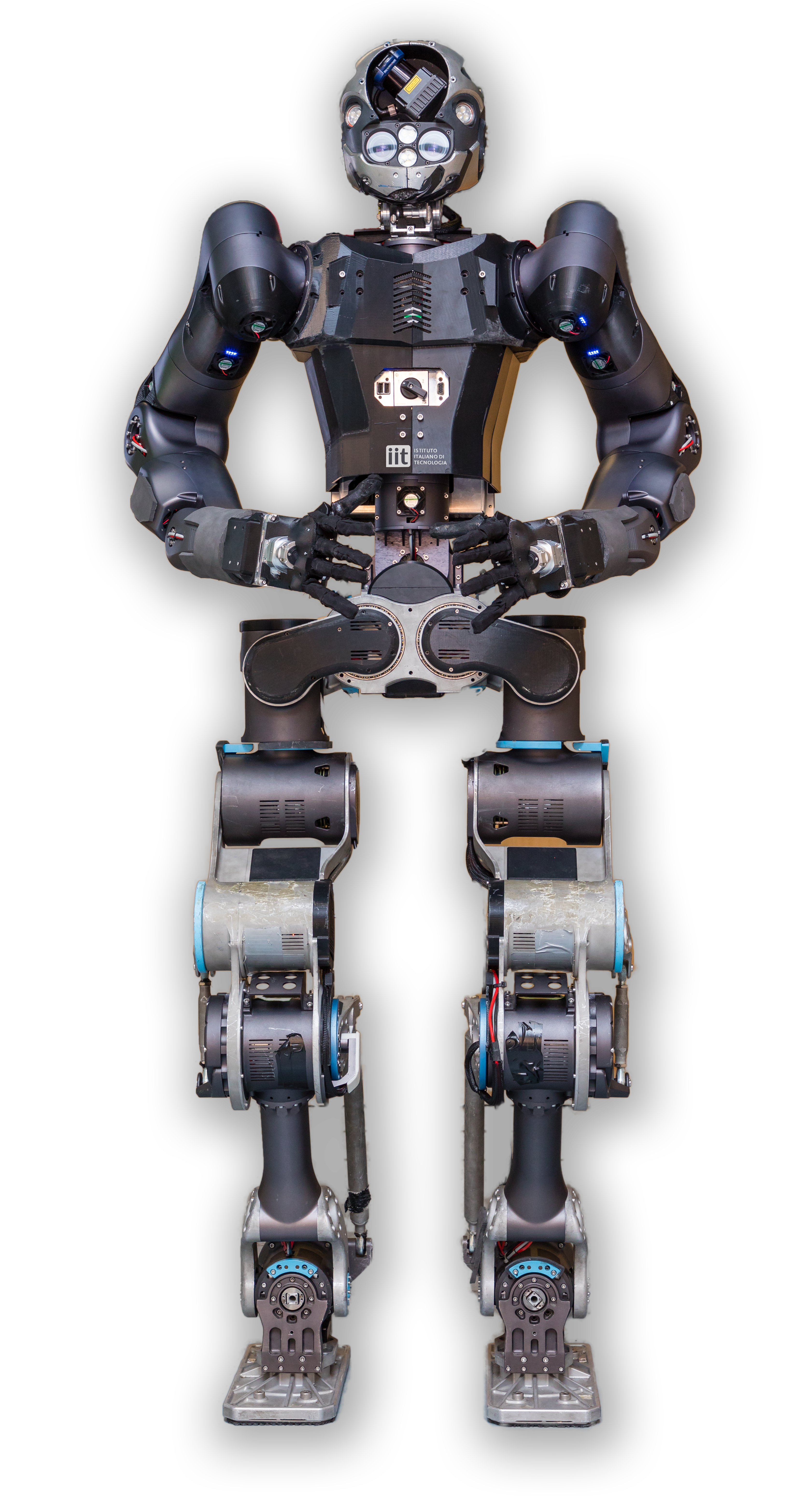
Het nieuwe prototype van de mensachtige Walk-Man robot is 1,85 m lang, heeft 62 cm brede schouders en weegt 102 kg. Om het gewicht laag te houden, zijn onderdelen gebruikt van onder meer aluminiumlegeringen, magnesiumlegeringen, titanium en composietmaterialen. Hoe lager het gewicht, hoe dynamischer de robot kan bewegen en hoe minder energie hij verbruikt.
Het huidige prototype kan ongeveer twee uur opereren op een accu van 1 kWh.
De mensachtige SoftHands, ontwikkeld door de Università di Pisa, hebben 19° bewegingsvrijheid en kunnen veel verschillende soorten objecten vastpakken. Het draagvermogen per arm is 10 kg. Dankzij de toepassing van zachte actuatoren kan de robot veilig samenwerken met mensen zonder risico op letsel.
Hoofd
De robot wordt op afstand aangestuurd door een echte brandweerman in een sensorpak. Doordat de robot diens bewegingen nabootst, kan deze heel natuurlijk bewegen. Twee versnellingsmeters zorgen ervoor dat de robot in balans blijft.
Het hoofd van de robot is uitgerust met een 3D-laserscanner, microfoons en videocamera’s om realtime informatie terug te sturen naar de brandweerman en het reddingsteam om de situatie in te schatten. In de toekomst kan het robothoofd ook worden uitgerust met chemische sensoren om bijvoorbeeld een gaslek of giftige stoffen te detecteren.
Aardbeving
Tijdens de eindtest moest de Walk-Man een door een aardbeving beschadigde fabriek binnengaan, waar sprake was van een gaslek en brand.
De robot navigeerde door een beschadigde ruimte en moest daar vier specifieke taken uitvoeren: de deur openen en passeren, de gaskraan opsporen en dichtdraaien, brokstukken in zijn pad weghalen en de brandhaard detecteren en blussen met een brandblusser.
Walk-Man wist alle taken probleemloos uit te voeren.
tekst Paul Schilperoord
foto's Walk-Man/ITT
Meer artikelen

Een AI-fabriek in Groningen

Gezondheid meten via zweetdruppels


Nieuwste artikelen
Een AI-fabriek in Groningen


