Robot rent als cheeta
Het is mogelijk een vierbenige robot bijna net zo energiezuinig te laten rennen als een cheeta, zo blijkt uit het onderzoek waarop ir. Geert Folkertsma morgen promoveert. Alleen de snelheid moet nog beter.
Uniek zijn ze niet, de cheeta-robots, geïnspireerd op het zoogdier dat het snelst kan rennen. Folkertsma heeft zelf stage gelopen bij het Massachussets Institute of Technology en de spinoff Boston Dynamics. ‘Ze maken daar fantastische robots die er uit zien als een cheeta en motoren gebruiken om te bewegen. Wat mij vooral interesseerde was het nabootsen van het dynamische gedrag van het roofdier, die zijn hoge snelheid op een heel energie-efficiënte manier weet te bereiken.’ Het resulteerde in een promotie-onderzoek aan de Universiteit Twente.
Rug
Folkertma bestudeerde opnames van het jachtluipaard en kwam er achter dat de rug een cruciale rol speelt. ‘Door die te krommen slaat die energie op, en geeft die energie door zijn rug te strekken aan de poten.’
Meestal dient de rug bij vierpotige robots alleen als verbindingsstuk, Folkertsma wist nu dat die rug het centrale onderdeel moest zijn van het bewegingssysteem. ‘De poten dienen vooral om zich van de grond af te zetten en vervolgens van de grond los te komen.’
Oscillatie
Wat Folkertsma verder nog uit de videobeelden haalde was dat de rennende cheeta een oscillerende beweging maakt. ‘De rug bouwt energie op, geeft die aan de poten, en bouwt weer energie op, in een vast ritme. Ik moest dus zorgen dat mijn robot-cheeta ook zo’n oscillerende beweging zou aannemen.’ Dat klinkt zo heel vanzelfsprekend, maar wie wel eens robots heeft zien lopen weet dat de meeste helemaal niet op die manier voortbeweging, maar veel vaker voetje-voor-voetje.
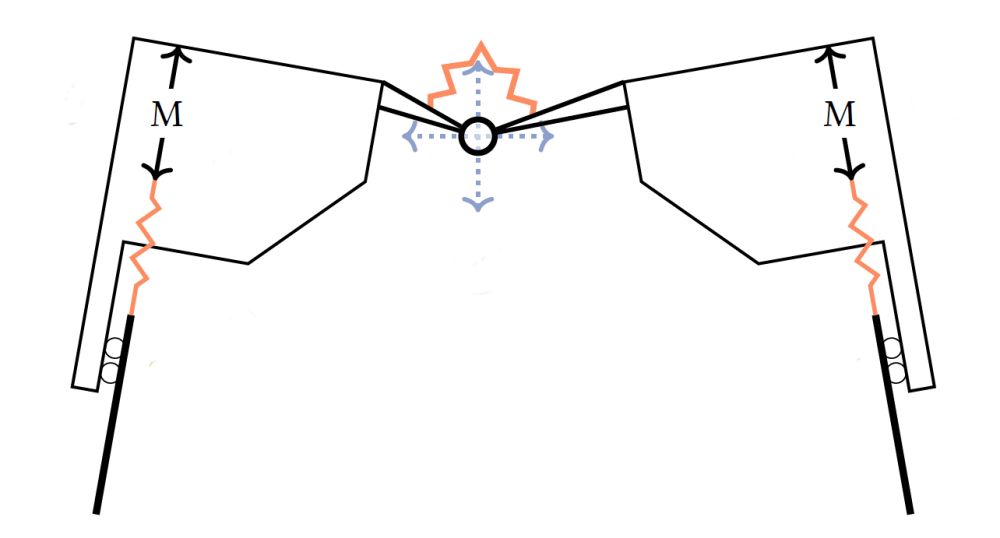
Voor een oscillerende beweging ligt een massa-veer systeem het meest voor de hand, zoals een gewichtje dat aan een veer hangt regelmatig heen en weer beweegt tot de wrijving die heeft gedempt. Het ‘lichaam’ van de robot-chetaah vormt de massa. De rug, met ergens in het midden een scharnierpunt, heeft een veer, en hetzelfde geldt voor de poten. Met dat geheel kreeg Folkertsma de gewenste oscillerende beweging.
Simpele poten
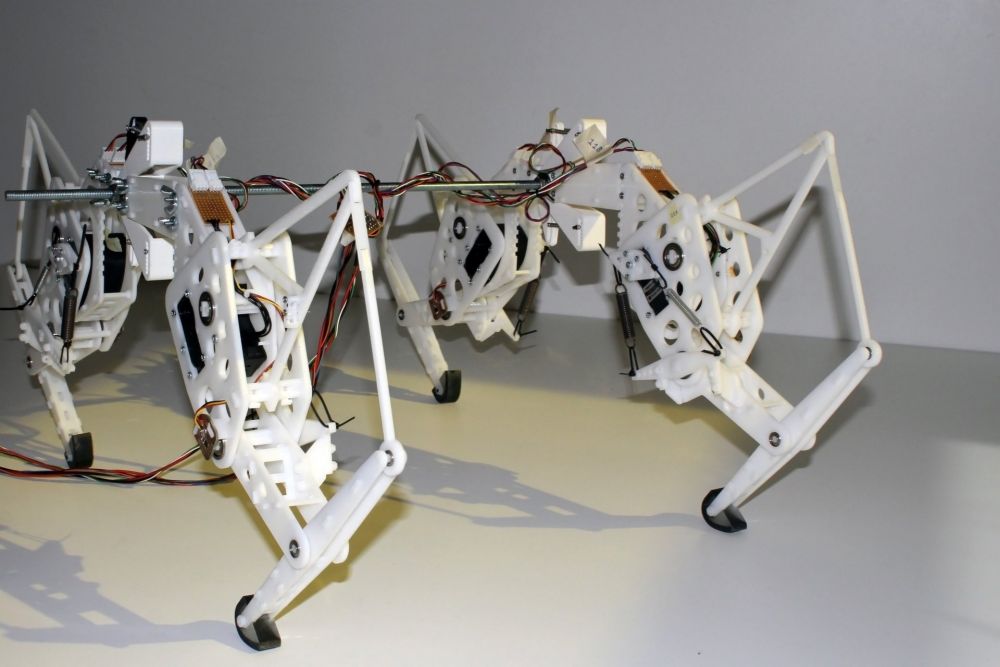
De poten zelf hoeven in het ontwerp van Folkertsma niet meer te doen dan los te komen van de grond, en zijn uitgevoerd als ‘hoppers’ die alleen op en neer kunnen bewegen, zie de video hieronder.
De scharnierende rug zorgt voor de voortbeweging. Cruciaal daarbij is de ligging van het scharnierpunt. ‘Dat is een van de meest opvallende resultaten van mijn onderzoek: de positie van het scharnierpunt bepaalt de bewegingsrichting, voor of achteruit, naar links of naar rechts.’ In zijn experimentele opstelling kan Folkertsma dat scharnierpunt handmatig verstellen. Daar ligt een interessante verbetermogelijkheid: als Folkertsma de ligging van het scharnierpunt flexibel maakt kan de cheeta veel meer. ‘Op die manier zou de robot-cheeta achter een aangewezen doel aan kunnen rennen.’
De robot heeft vier motoren bij elke poot. ‘Het enige wat die doen is de veer in de poten wat extra spankracht geven om te compenseren voor de verloren wrijvingsenergie.’ Daarnaast heeft de robot-cheeta vijf verschillende massaveersystemen, van de rug en vier van elk van de poten. Folkertsma moest daarom veel tijd stopen in synchronisatie van al die oscillerende systemen. ‘Ze moeten precies op elkaar afgestemd bewegen.’ Wat hem daarbij enorm heeft geholpen was zijn idee om de cheeta te beschrijven als energiemodel. ‘Het lopen is niet anders dan het voortdurend uitwisselen van energie tussen de verschillende onderdelen.’
Flexibel
In zijn robot beschouwt hij de bewegende onderdelen, de veren en de algoritmen die de beweging sturen allemaal als onderdeel van het dynamische energiemodel. ‘Dat maakt het ontwerpen heel flexibel. Je kunt bijvoorbeeld een fysieke veer aanspannen, of dat virtueel door het algoritme laten doen, voor het functioneren van het gehele systeem maakt dat niet uit.’
Op die manier heeft hij ook de synchronisatie aangepakt. ‘Wanneer de controller merkt dat de achterpoten beginnen voor te lopen op de voorpoten, dan laat hij de motor bij de voorpoten een beetje extra energie geven.’
Het eindresultaat is een cheeta-robot die, gecorrigeerd voor het gewicht, hooguit 10-15 % meer energie gebruikt dan de levende uitvoering. ‘Dat is een doorbraak, want de meeste robots hebben om te bewegen veel energie nodig.’ Met de snelheid was Folkertsma minder succesvol. ‘Een echte cheeta rent tien keer sneller dan mijn robot. Een van de oorzaken is dat robotpoten niet bijdragen aan de voortbeweging, terwijl ze dat bij een cheeta wel doen.’
Folkertsma vindt zijn vierpotige uitvoering nog wel te breed. 'We hebben dat nodig voor de zijwaarste stabiliteit, hou zou eigenlijk net zo smal moeten worden als de echte cheeta.'
Meer artikelen

Een AI-fabriek in Groningen

Gezondheid meten via zweetdruppels


Nieuwste artikelen
Een AI-fabriek in Groningen


