
Robothand werkt op lucht
De robothand van industrieel ontwerper ir. Rob Scharff kan iemand de hand schudden. De holle vingers krommen naar binnen krommen als er lucht in wordt gepompt en stoppen met buigen als een voorwerp tegendruk biedt.
Robotgrijpers zijn doorgaans nogal lomp. Dat maakt ze niet zo geschikt voor het oppikken van kwetsbare groenten als aubergine. ‘Het is lastig om voorwerpen die verschillen in vorm en grootte netjes op te pakken. De aansturing vergt veel elektronica en sensoren’, vertelt industrieel ontwerper ir. Rob Scharff.
 De promovendus aan de TU Delft gooit het daarom over een andere boeg. Hij mikt op een nieuwe generatie zachte en lichte robotgrijpers met vingers die hol zijn en naar binnen krommen als er lucht in wordt gepompt. De vingers stoppen met buigen als een voorwerp tegendruk biedt. Vorm en afmeting van het object bepalen de ‘grijpstand’ van de vingers, bijvoorbeeld om een tennisbal heen gevouwen of licht gebogen bij een boek.
De promovendus aan de TU Delft gooit het daarom over een andere boeg. Hij mikt op een nieuwe generatie zachte en lichte robotgrijpers met vingers die hol zijn en naar binnen krommen als er lucht in wordt gepompt. De vingers stoppen met buigen als een voorwerp tegendruk biedt. Vorm en afmeting van het object bepalen de ‘grijpstand’ van de vingers, bijvoorbeeld om een tennisbal heen gevouwen of licht gebogen bij een boek.
De druk in de vingers is groot genoeg om relatief lichte objecten op te pakken, maar bezorgt groente geen beurse plekken. Elektronica en sensoren komen er niet aan te pas. ‘De robothand is daardoor vederlicht’, vertelt Scharff, die in april 2015 afstudeerde op een zachte robothand die interactief handen kan schudden.
Dat de vingers kunnen buigen, komt onder meer door de geometrie. Eén kant van een vinger bevat de holle kantelen van een kasteel, de tegenoverliggende zijde is recht. Bij het inblazen van lucht zetten de kantelen meer uit dan de vlakke zijde. ‘Die zijde kan nauwelijks in lengte toenemen, maar wel buigen. Het resultaat is een kromming van de hele vinger.’
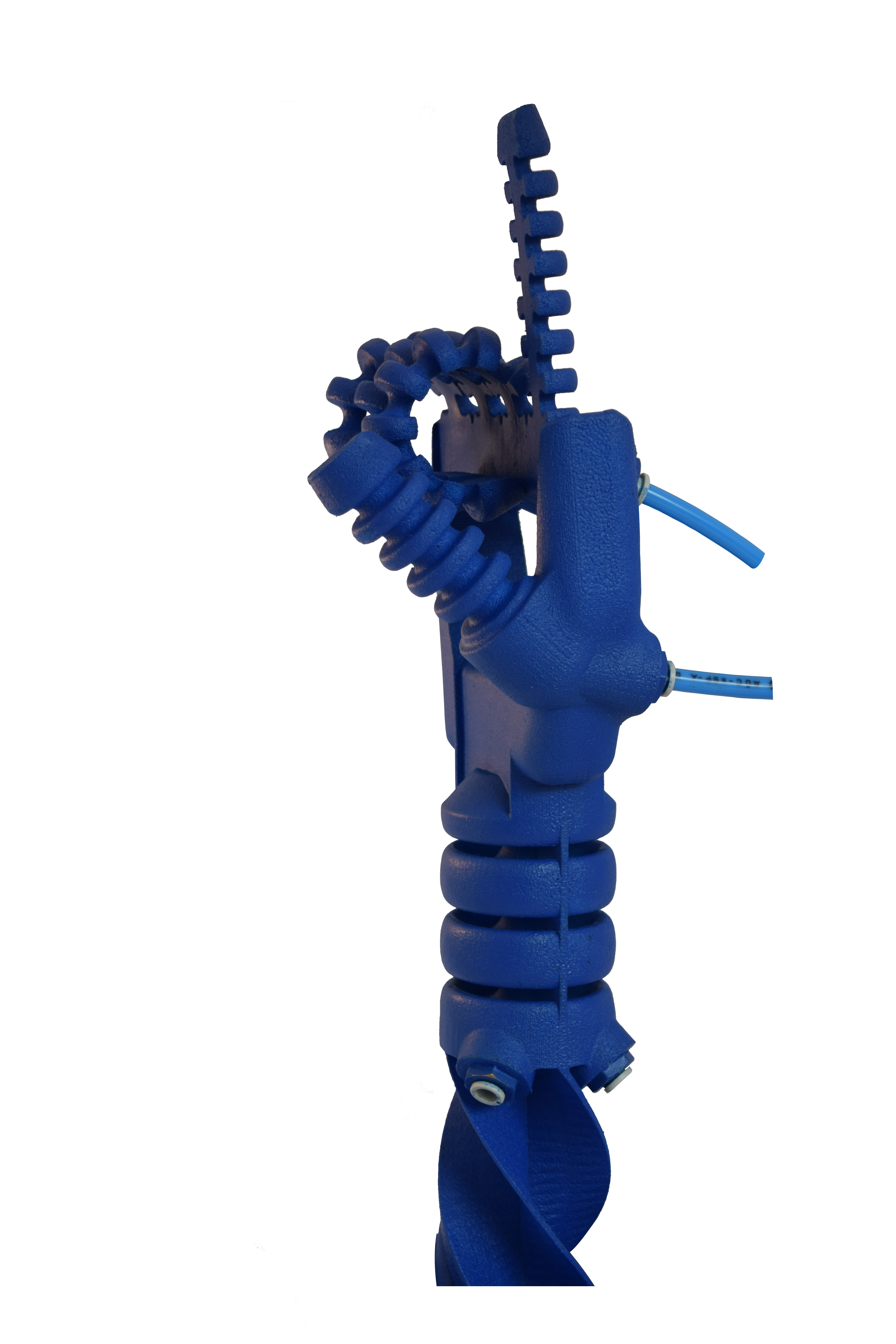
Polsgewricht
Het polsgewricht bestaat uit twee aparte luchtkanalen. Door in één kanaal meer lucht te blazen, zet die kant meer uit en beweegt de pols naar links of naar rechts. De pols is stijf te maken door beide kanalen vol te pompen met lucht.
De pols en hand kunnen draaien dankzij een luchtkamer met een helixvorm. Scharff keek die vorm af van de slurf van een olifant. Bij het aantrekken van de spieren, die als een helix in de slurf zijn gewikkeld, draait de slurf verschillende kanten op. De pols van de robot draait ongeveer op dezelfde manier. ‘Over de lengteas van de helixvorm zijn er verschillende plekken die uitzetten. Hierdoor is er draaiing.’
De robothand wordt de komende jaren beproefd bij een aantal tuinbouwbedrijven. ‘Doel is om over vier jaar een industrieel product te hebben.’
Meer artikelen

Een AI-fabriek in Groningen

Gezondheid meten via zweetdruppels


Nieuwste artikelen
Een AI-fabriek in Groningen


