
Door meer dan 1500 huiskamers in 3D te scannen hopen onderzoekers van Stanford University, Princeton en de TU München de zorgrobots van de toekomst beter te kunnen trainen. De wetenschappers scanden de kamers zelf in en vroegen vrijwilligers om alle gescande objecten van een naam te voorzien.
Het is een modern monnikenwerk: met een 3D-camera door honderden verschillende kamers lopen en elk hoekje en gaatje scannen. Op deze wijze legde TU München-hoogleraar Matthias Neissner 1536 verschillende kamers vast, toen hij op bezoek was bij een collega bij het Amerikaanse Stanford University. Hij gebruikte een speciale camera die wat lijkt op de Kinect: een combinatie van camera en infrarood-sensor, die beweging voelt en zo driedimensionale beelden kan maken.
Training
Neissner en collega's voltooiden hun werk omdat ze weten hoe belangrijk het voor robots is om een goed digitaal beeld van de wereld om hen heen te hebben. Met dat 3D-beeld trainen ze, lang voordat ze echt aan het werk moeten, via zelflerende algoritmen hoe ze moeten bewegen in een kamer. Voor een robot is dat verrassend moeilijk: hij moet alle objecten in een kamer in zich opnemen, ongeveer weten hoe ze zullen reageren als de robot in de buurt komt en zo een pad creëren door het huis.
Dit alles moet ook nog eens snel en soepel gebeuren. Vloerkleden leveren bijvoorbeeld al problemen op voor robots, omdat ze een andere kleur hebben dan de rest van de vloer; de robot denkt daardoor soms dat een kleed een object is waar hij niet langs kan.
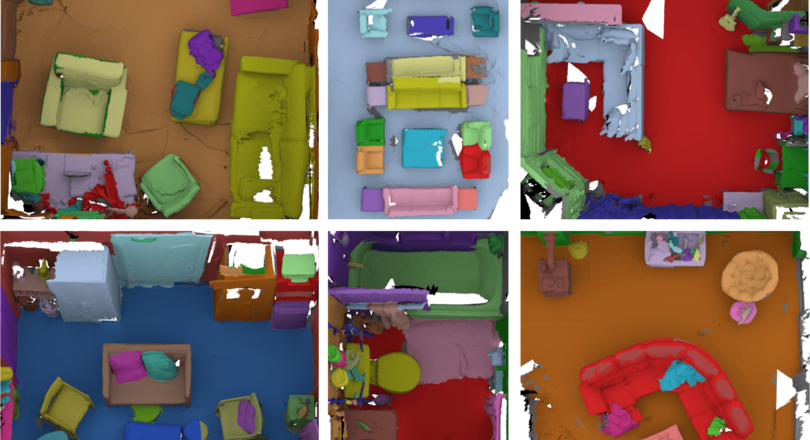
Beeldbanken zijn goede leerstof voor robots. Maar die bestaan nog nauwelijks; de hoeveelheid 3D-gescande kamers op internet was tot nu toe povertjes. Neissner en collega's brengen daar met hun nieuwe databank ScanNet verandering in.
Nabouwen
Niet alleen de onderzoekers leverden een belangrijke bijdrage; om de database nuttig te maken was ook een heel leger aan vrijwilligers nodig. Hen werd gevraagd om de 3D-beelden te bekijken en alle objecten van een naam te voorzien: tafel, kleed, dressoir, aanrecht, enzovoort. De andere groep moest met software de gescande kamer versimpeld nabouwen. Die in software nagebouwde kamers zijn aanzienlijk makkelijker te verteren voor een robotbrein dan een 'echte' kamer, waar lichtval en andere dingen de robotogen snel verwarren.
Sneller
ScanNet is een open toegankelijke, specifieke dataset voor een heel specifiek doel: robots veilig en snel door een huis laten lopen. Die vaardigheid kan echter heel belangrijk worden, bijvoorbeeld als machines op mensen moeten gaan passen die thuis zitten en kwetsbaar zijn. Als een robot zich beter door een gebouw kan bewegen, is hij sneller aanwezig in spoedgevallen en kan hij in het algemeen sneller een taak uitvoeren.
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.