
Drone vliegt razendsnel door onbekende omgeving
Drones kunnen sneller en veiliger helemaal zelf door complexe omgevingen vliegen dankzij een nieuwe aanpak voor het navigeren. Een experimenteel vliegend robotje gebruikt hiervoor alleen zijn camera’s, zijn sensoren en de computer aan boord. In experimenten haalde hij snelheden tot 40 kilometer per uur, met nauwelijks botsingen.
De beste piloot voor een drone was tot nu toe altijd nog de mens. Om een drone snel door complexe – en dus gevaarlijke – omgevingen te sturen, was een piloot nodig die met een controller – zo’n kastje met hendeltjes – de drone op afstand radiografisch de juiste bochten liet maken.
Dat is nu voorbij, als het aan ingenieurs van de Universität Zürich ligt. Zij hebben een nieuwe manier bedacht waarmee een autonome (zelfsturende) drone razendsnel en behoorlijk veilig door ingewikkelde omgevingen kan vliegen; denk aan een bos, een bergachtig gebied waar sneeuw ligt of een rampgebied. Ze beschrijven hun methode in een artikel in vaktijdschrift Science Robotics, dat gisteren verscheen.
Te langzaam
Tot nu toe navigeren autonome drones meestal door hun besturing op te splitsen in deeltaken: het waarnemen van de omgeving, een kaart opstellen, en de route plannen. ‘Deze aanpak is weliswaar succesvol bij lage snelheden, maar kan problematisch zijn voor navigatie bij hoge snelheid in omgevingen die onoverzichtelijk zijn’, schrijven de onderzoekers in hun artikel. De bestaande methode wordt te langzaam.
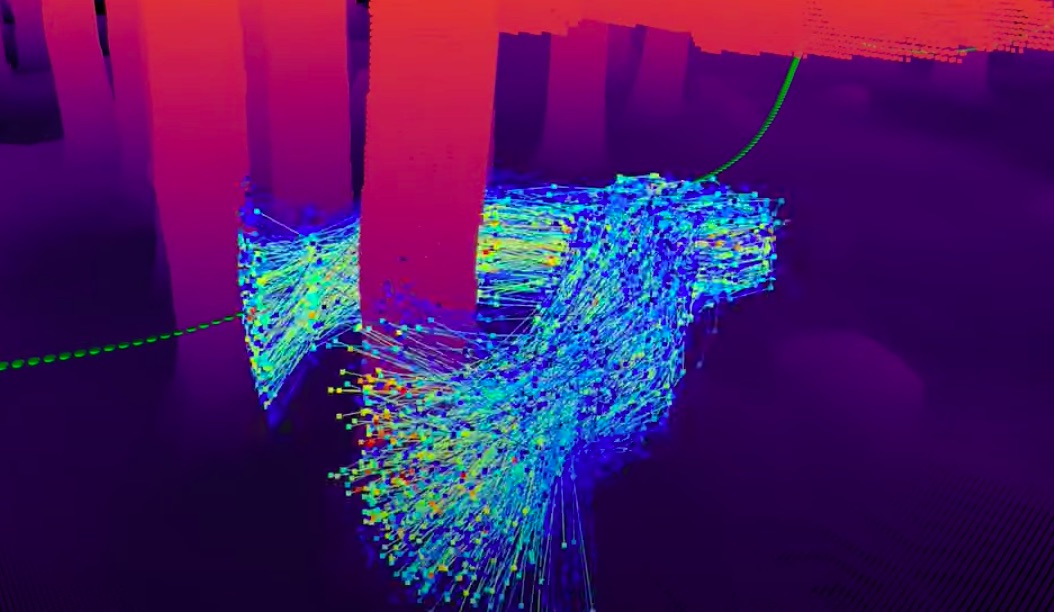
Hun oplossing is om de drone voortdurend (vele malen per seconde) de mogelijke trajecten door de laten rekenen waarbij een botsing wordt vermeden. In de figuur hierboven is dat te zien; de drone heeft honderden opties om de boom te vermijden.
Dit alles berekent de drone op basis van zijn eigen bekende positie en oriëntatie, gecombineerd met een 3D-weergave van zijn omgeving, in de vorm van een puntenwolk. Razendsnel neemt de drone een beslissing om bij te sturen en in welke richting dat dan moet gebeuren.
Ontelbare simulaties
Maar hoe ‘weet’ de drone dan wat de beste route is? Die keuze baseert hij op basis van ervaring, opgedaan in ontelbare simulaties. ‘We hebben een grote en gevarieerde dataset verzameld in simulaties’, vertelt Antonio Loquercio, promovendus aan de Universität Zürich. ‘Deze berg data — wel honderdduizend verschillende beelden — is de sleutel tot ons succes, en tot de flexibiliteit van de drone.’
Simpel gezegd komt een drone die rondvliegt steeds voor nieuwe, onbekende omgevingen te staan. Maar doordat zijn computer eerder al zoveel simulaties heeft doorgerekend, lijkt elk driedimensionaal beeld wel op een van de omgevingen in een simulatie. Razendsnel besluit de software van de drone wat op dat moment de veiligste optie is. ‘Per seconde neemt de drone vijftien keer een beslissing’, zegt Loquercio.
Geen overbodige luxe als je ziet hoe snel een drone in een bos de boomstammen op zich ziet afkomen:
'Cool en uitdagend'
Hoewel een groot deel van dit project plaatsvond op de computer, trokken de onderzoekers er ook op uit met een speciale drone. ‘Dit was het spannendste gedeelte: het vliegen in het wild’, vertelt Loquercio. ‘Dat was heel cool om te doen, maar ook heel uitdagend. Vooral toen het koud was en sneeuwde. We moesten de drone onder onze jas houden om te zorgen dat de accu en de sensoren het bleven doen.’
Maar in de sneeuw waren er ook knappe prestaties. Zo bleek de drone goed uit de voeten te kunnen boven een sneeuwdek, iets dat de onderzoekers niet hadden verwacht. ‘De weerkaatsing van zonlicht op de sneeuw, plus de lage temperaturen, geeft veel ruis op de camera’s. We hadden nog niet eerder in deze omstandigheden getraind, maar de besturing van de drone slaagde erin om heel behoorlijk te blijven werken, zelfs met ruizige beelden.’
Crashes
Toch was het onvermijdelijk dat er ook crashes waren. ‘Natuurlijk, maar daar hadden we ook rekening mee gehouden. Onze drone is ontworpen met speciale “breekpunten”, die bezwijken bij een crash maar die naderhand snel te herstellen zijn. En kwetsbare onderdelen zoals de computer en sensoren hadden we ingepakt met elastisch materiaal.’
Nog sneller vliegen
Het team heeft ook al ideeën voor vervolgonderzoek. Zo moet de drone behalve van simulaties ook gaan leren van de echte omgevingen waar hij doorheen vliegt. Ook willen ze de drone camera’s geven die sneller goede beelden kunnen maken van de omgeving. Loquercio: ‘Op die manier zal de drone nog sneller kunnen vliegen dan de veertig kilometer per uur die we nu halen.’
Als drones eenmaal snel en toch veilig zelf kunnen vliegen, ook in drukke, chaotische omgevingen, dan zijn er tal van toepassingen denkbaar. ‘Denk aan drones die spullen bezorgen, die luchtfoto’s maken en die meedoen aan zoekacties naar vermiste personen. Of aan racedrones. Allemaal toepassingen waarbij grote afstanden worden afgelegd in een korte tijd.’
Verder lezen
Meer details over dit drone-onderzoek zijn te lezen op de projectpagina van de Universität Zürich. Deze collage geeft een goed overzicht van de verschillende omgevingen waar de drone is getest:
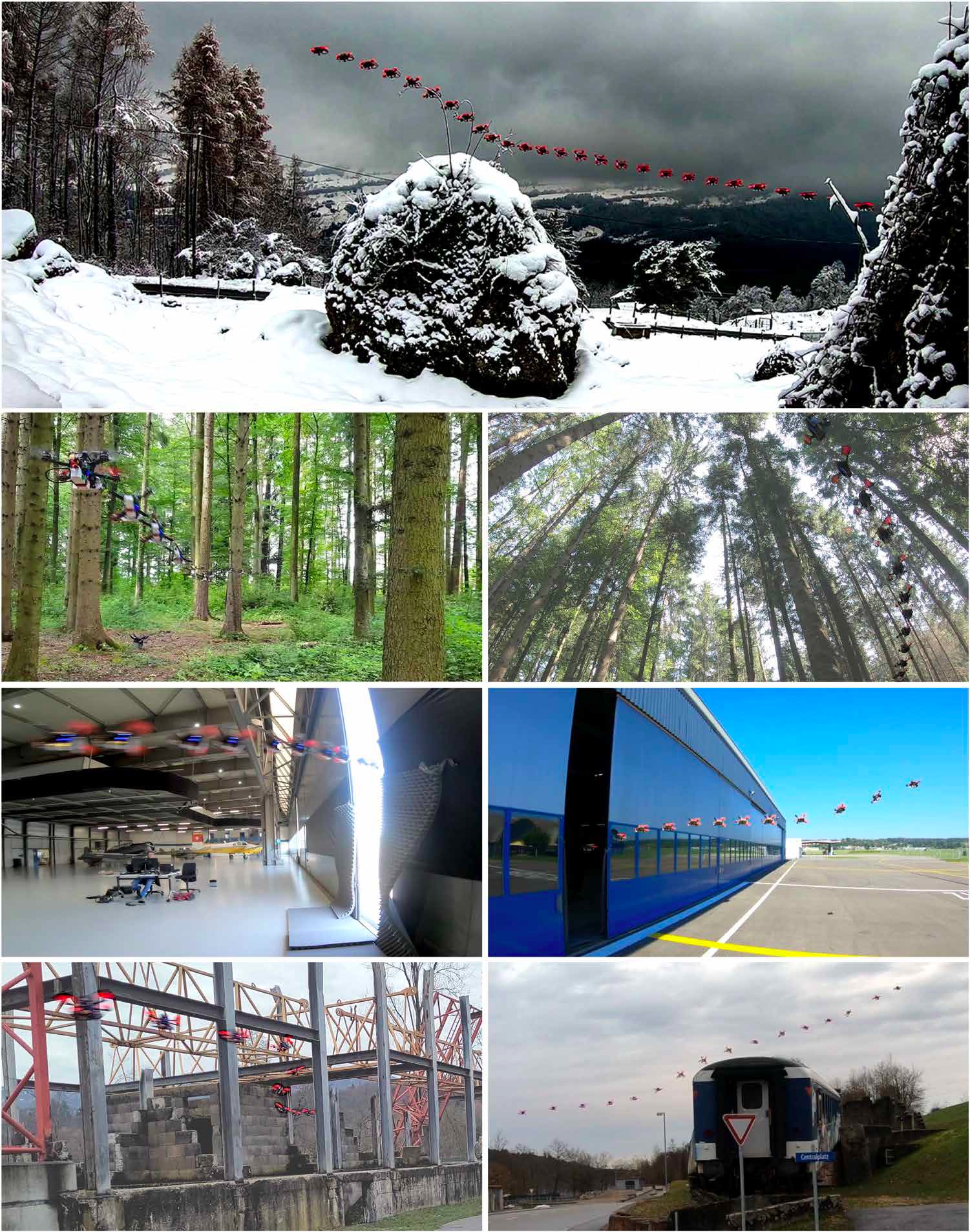
Beeldmateriaal: Loquercio et al., Science Robotics, 2021.






