

Amerikaanse onderzoekers bedekten een buisvormige robot met een kunstmatige slangenhuid, waardoor deze zich kan voortbewegen. Het mechanisme maakt het gebruik van dit soort robots bij verkenningsoperaties mogelijk.
Voortbewegende robots met het gebruik van poten en wielen zijn niks bijzonders. Maar dat zijn altijd grote, zware exemplaren. De onderzoekers van Harvard University richtten zich op een klein buisvormig exemplaar dat in staat is om door spleten en gaatjes te kruipen.
Zo’n buisvormige robot heeft met behulp van een luchtpomp een mechanisme om zich langer en korter te maken, maar dat levert nog geen voorwaartse beweging op. De huid van slangen bood echter inspiratie om de robot wel in beweging te brengen.
Kirigami
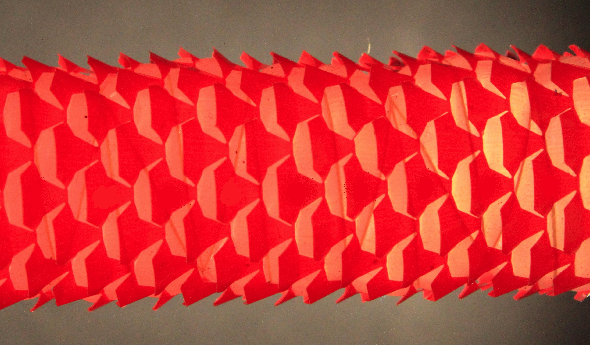
De onderzoekers gaven een uitrekbare robotbuis een kunstmatige slangenhuid, om hem te laten kruipen. Hiervoor gebruikten ze de Japanse techniek kirigami, een variant van origami. Met een laser sneden de wetenschappers een vel papier in allemaal kleine stukjes, die de schubben vormden. Daarna maakten ze de schubben in een specifiek patroon vast aan een plastic vel, dat ze om de robotbuis wikkelden.
De schubben hebben de vorm van een trapezium, een vierhoek waarvan minstens twee tegenoverliggende zijden evenwijdig zijn. De onderzoekers testten ook ronde en driehoekige schubben, maar hiermee kroop de robot minder snel.
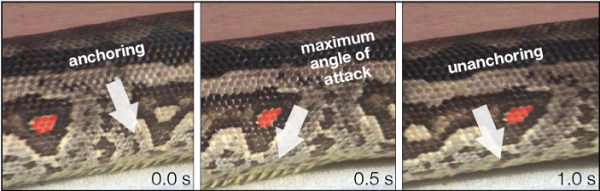
Verankeren
Wanneer de robot zich uitrekt, klappen de schubben naar buiten en kunnen ze zich verankeren aan de grond. Als de robot zich samentrekt, zorgt de wrijvingskracht van de schubben voor een voorwaartse beweging. Zonder deze huid zou de robot op dezelfde plaats korter en langer worden, zonder zich te verplaatsen. Met de huid was de robot in staat om zich voort te bewegen over grove oppervlakken, zoals asfalt.
Op straat
Aan het begin waren de robots aangesloten op een luchtpomp, die voor de strekbeweging zorgde. Dit is onpraktisch, dus de onderzoekers maakten ook een losse robot. Deze heeft een besturingssysteem, een batterij en een luchtpomp aan boord. De onderdelen zijn samen 25 mm3 groot en wegen maar 45 g, zodat de robot ze moeiteloos mee kan nemen. Hij is draadloos verbonden met een laptop. Op straat kroop de robot zo’n 7,5 mm per seconde.
Met de losse robot zetten de onderzoekers een eerste stap naar de toepassing van de deze robots bij reddings- of verkenningsmissies. Hiervoor moet de robot wel meer sensoren kunnen dragen.
Openingsfoto: pixabay.com
Nieuwsbrief
Vond je dit een interessant artikel, abonneer je dan gratis op onze wekelijkse nieuwsbrief.