
Zo voel je wrijving als je iets optilt
Wie wel eens haastig een vol glas bier heeft opgepakt, weet dat het ook uit je vingers kan glijden. Toch gaat dit meestal goed, en dat is te danken aan subtiele metingen door cellen in je vingertoppen. Die weten supersnel of ze harder of zachter moeten knijpen. Delfts onderzoek hiernaar kan robots beter maken.
Als je wel eens een ijsklontje op de grond hebt laten vallen, weet je hoe moeilijk het is om dat op te pakken. Het ijsblokje plakt aan de grond en je vingertoppen krijgen maar geen grip op het spiegelgladde oppervlak van het ijs.
Toch is de tastzin die wij in onze vingers hebben onovertroffen. Probeer een voorwerp met je hand op te tillen en je lichaam ‘weet’ binnen een fractie van een seconde (honderd milliseconden) hoe glad het oppervlak is, en of de vingers dus meer druk moeten uitoefenen om het object stevig vast te houden en niet te laten glippen.
Onbewust gedrag
‘Dat gedrag gaat onbewust, je zenuwstelsel doet dit gewoon vanzelf’, vertelt Michaël Wiertlewski, universitair docent robotica van de Technische Universiteit Delft. Maar hoe dat werkt op het niveau van de vingertop, daarover was nog niet zoveel bekend.
Daar heeft onderzoeker Laurence Willemet uit zijn groep nu verandering in gebracht. Afgelopen maandag promoveerde de Française aan de Aix-Marseille Université op het onderzoek dat zij in Delft deed naar de menselijke tastzin. Om precies te zijn: wat gebeurt er in de vingers als de vingertop wrijving voelt? Dinsdag verscheen een artikel met haar onderzoeksresultaten in het tijdschrift PNAS.
Speciaal apparaatje
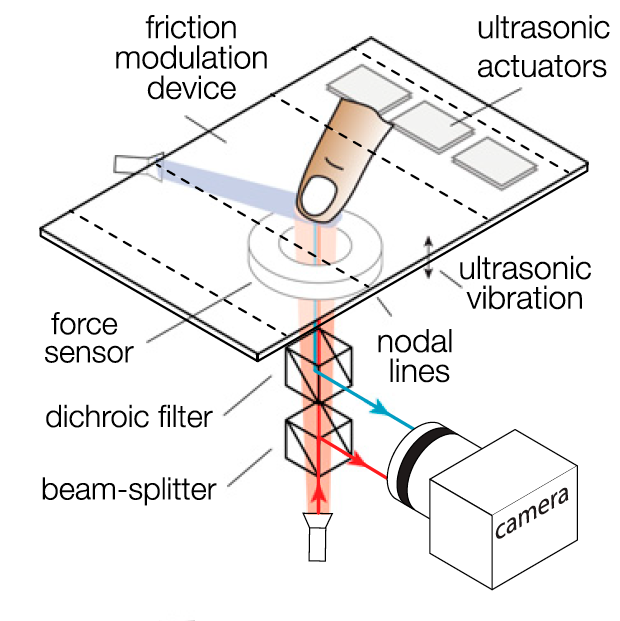
Samen met Wiertlewski en collega Jocelyn Monnoyer van de Franse universiteit bouwde Willemet een speciaal apparaatje (te zien op de foto boven dit artikel) om metingen te doen aan de interactie van een vinger met een oppervlak.
Op het eerste gezicht doet dit apparaatje denken aan een vingertop-scanner, die wel wordt gebruikt om in te loggen in een computer of om een deur te openen. Het heeft een rechthoekig glasplaatje waar de vinger op moet worden geplaatst, waarna vervormingen worden gefilmd met een highspeedcamera. ‘Verschil is dat ons apparaatje de vingertop vanuit twee richtingen belicht’, legt Wiertlewski uit.
‘Ten eerste loodrecht, om te laten zien op welke punten de vingertop contact maakt. En ten tweede van de zijkant, om de oneffenheden van de huid van de vinger af te beelden.’ Het zijn die oneffenheden die de beeldherkennings-software gebruikt om de vervorming te meten.
Wrijving inschatten
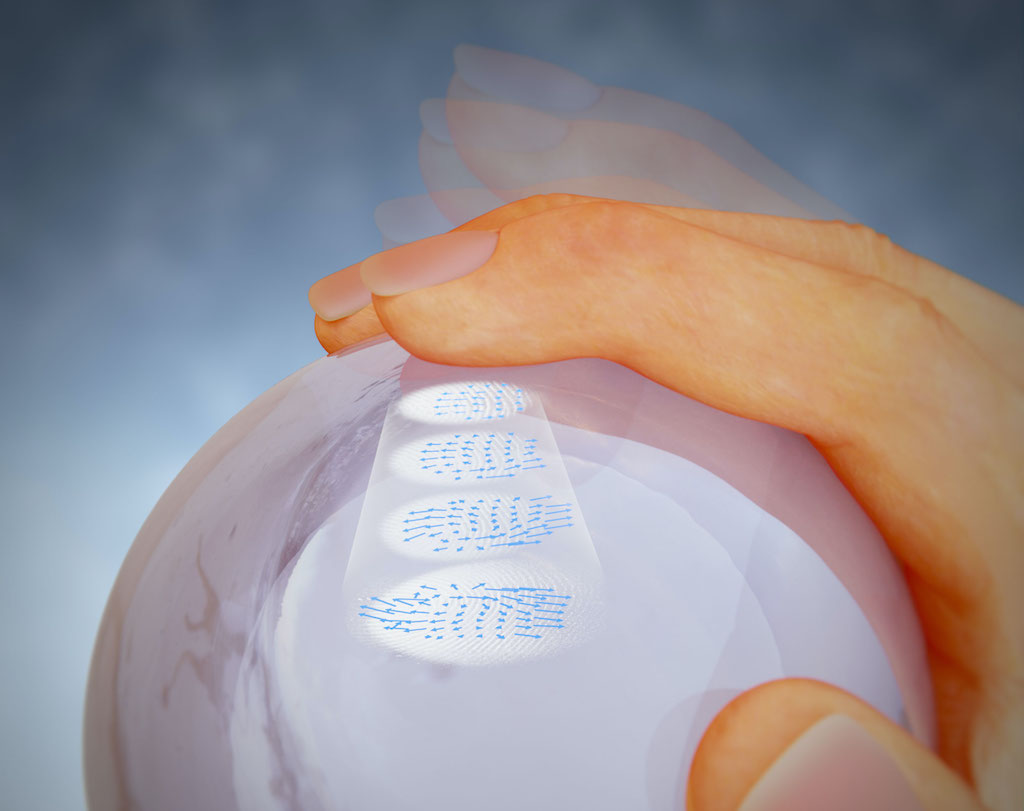
Proefpersonen moesten hun vinger op de glasplaat van het apparaatje zetten en de wrijving inschatten die ze ervoeren. Die wrijving tussen vinger en glas is namelijk niet steeds hetzelfde, maar is op een vernuftige manier in te stellen. Om de wrijving van het testoppervlak te veranderen, treedt namelijk een ultrasone trilling in werking; dat is een trilling bij een frequentie die niet hoorbaar is.
Als die vibratie afwezig is, voelt het oppervlak normaal aan met een vingertop; die ervaart gewoon glas. Maar gaat het oppervlak nu ultrasoon trillen (met een amplitude van maar een paar micrometer), dan valt die wrijving goeddeels weg. De vingertop glijdt er veel makkelijker overheen. Wiertlewski: ‘Je kan het vergelijken met schaatsen, waarbij je bijna wrijvingsloos over het oppervlak glijdt.’
Subtiele vervorming van vingertop
De onderzoekers lieten tientallen proefpersonen hun vinger op het glas zetten en lieten de highspeedcamera beelden maken van de vingertopjes. Speciale software analyseerde deze beelden en legde de subtiele vervorming vast in keiharde cijfers. Hieruit blijkt dat een kleine (radiale) vervorming van de huid van de vingertop samenhangt met het ervaren van wrijving.
Robots tastzin geven
Hiermee hebben Wiertlewski en Willemet de kennis over tastzin verder gebracht. Maar waarom houdt de groep van Wiertlewski aan de TU Delft zich eigenlijk bezig met de tastzin bij mensen? ‘Wij begeven ons inderdaad in een onderdeel van de neurowetenschap. Dat doen we omdat we deze kennis willen toepassen in de robotica. We willen robots een vorm van tastzin geven.’
Robots kunnen al voorwerpen oppakken en verplaatsen, maar volgens Wiertlewski zie je bijna nooit een robot een object echt manipuleren. ‘Daarmee bedoel ik dat wij mensen een voorwerp door onze handen kunnen laten glijden, kunnen roteren, heel subtiele interacties. Robots kunnen dat niet, nóg niet.’
De groep werkt nu aan een sensor die vervorming kan detecteren. Ook bij het ontwikkelen van de besturing van robotprothesen en -grijpers zullen de Delftse onderzoekers zich laten inspireren door de menselijke tastzin.
Nobelprijs
De Delftse robotonderzoekers zitten in een vakgebied waarin veel gebeurt. Eerder dit jaar ging de Nobelprijs voor de Geneeskunde naar twee onderzoekers die nieuwe dingen hebben ontdekt over het biochemische mechanisme achter de werking van tastzin en hoe het menselijk lichaam temperatuur waarneemt.
Foto's TU Delft






